Skip to main content
Physics
My Channels
College Channels
Professional Channels
My Channels
Chemistry
General Chemistry
Organic Chemistry
Analytical Chemistry
GOB Chemistry
Biochemistry
Intro to Chemistry
Biology
General Biology
Microbiology
Anatomy & Physiology
Genetics
Cell Biology
Math
College Algebra
Trigonometry
Precalculus
Physics
Physics
Business
Microeconomics
Macroeconomics
Financial Accounting
Social Sciences
Psychology
Programming
Introduction to Python
Microsoft Power BI
Data Analysis - Excel
Introduction to Blockchain
HTML, CSS & Layout
Introduction to JavaScript
R Programming
Product & Marketing
Agile & Product Management
Digital Marketing
Project Management
AI in Marketing
Channels Home
Start typing, then use the up and down arrows to select an option from the list.
?
Get exam ready
Upload syllabus
My Course
Learn
Practice
Explore
Bookmarks
Select textbook and university
Improve your experience by picking them
Table of contents
Skip to main content
0. Math Review
31m
Worksheet
Math Review
31m
1. Intro to Physics Units
1h 23m
Worksheet
Introduction to Units
23m
Unit Conversions
18m
Solving Density Problems
13m
Dimensional Analysis
10m
Counting Significant Figures
5m
Operations with Significant Figures
11m
2. 1D Motion / Kinematics
3h 56m
Worksheet
Vectors, Scalars, & Displacement
13m
Average Velocity
32m
Intro to Acceleration
7m
Position-Time Graphs & Velocity
26m
Conceptual Problems with Position-Time Graphs
22m
Velocity-Time Graphs & Acceleration
5m
Calculating Displacement from Velocity-Time Graphs
15m
Conceptual Problems with Velocity-Time Graphs
10m
Calculating Change in Velocity from Acceleration-Time Graphs
10m
Graphing Position, Velocity, and Acceleration Graphs
11m
Kinematics Equations
37m
Vertical Motion and Free Fall
19m
Catch/Overtake Problems
23m
3. Vectors
2h 43m
Worksheet
Review of Vectors vs. Scalars
1m
Introduction to Vectors
7m
Adding Vectors Graphically
22m
Vector Composition & Decomposition
11m
Adding Vectors by Components
13m
Trig Review
23m
Unit Vectors
15m
Introduction to Dot Product (Scalar Product)
12m
Calculating Dot Product Using Components
12m
Intro to Cross Product (Vector Product)
23m
Calculating Cross Product Using Components
17m
4. 2D Kinematics
1h 42m
Worksheet
Intro to Motion in 2D: Position & Displacement
20m
Velocity in 2D
27m
Acceleration in 2D
12m
Kinematics in 2D
18m
Intro to Relative Velocity
23m
5. Projectile Motion
3h 7m
Worksheet
Intro to Projectile Motion: Horizontal Launch
35m
Negative (Downward) Launch
25m
Symmetrical Launch
25m
Projectiles Launched From Moving Vehicles
15m
Special Equations in Symmetrical Launches
16m
Positive (Upward) Launch
50m
Using Equation Substitution
17m
6. Intro to Forces (Dynamics)
3h 22m
Worksheet
Newton's First & Second Laws
16m
Types Of Forces & Free Body Diagrams
20m
Forces & Kinematics
12m
Vertical Forces & Acceleration
23m
Vertical Equilibrium & The Normal Force
18m
Forces in 2D
36m
Equilibrium in 2D
24m
Newton's Third Law & Action-Reaction Pairs
11m
Forces in Connected Systems of Objects
38m
7. Friction, Inclines, Systems
2h 44m
Worksheet
Inclined Planes
20m
Kinetic Friction
17m
Static Friction
21m
Inclined Planes with Friction
37m
Systems of Objects with Friction
10m
Systems of Objects on Inclined Planes with Friction
19m
Stacked Blocks
16m
Intro to Springs (Hooke's Law)
20m
8. Centripetal Forces & Gravitation
7h 26m
Worksheet
Uniform Circular Motion
7m
Period and Frequency in Uniform Circular Motion
20m
Centripetal Forces
15m
Vertical Centripetal Forces
10m
Flat Curves
9m
Banked Curves
10m
Newton's Law of Gravity
30m
Gravitational Forces in 2D
25m
Acceleration Due to Gravity
13m
Satellite Motion: Intro
5m
Satellite Motion: Speed & Period
35m
Geosynchronous Orbits
15m
Overview of Kepler's Laws
5m
Kepler's First Law
11m
Kepler's Third Law
16m
Kepler's Third Law for Elliptical Orbits
15m
Gravitational Potential Energy
21m
Gravitational Potential Energy for Systems of Masses
17m
Escape Velocity
21m
Energy of Circular Orbits
23m
Energy of Elliptical Orbits
36m
Black Holes
16m
Gravitational Force Inside the Earth
13m
Mass Distribution with Calculus
45m
9. Work & Energy
1h 59m
Worksheet
Intro to Energy & Kinetic Energy
5m
Intro to Calculating Work
27m
Net Work & Work-Energy Theorem
25m
Work On Inclined Planes
16m
Work By Springs
16m
Work As Area Under F-x Graphs
7m
Power
19m
10. Conservation of Energy
2h 51m
Worksheet
Intro to Energy Types
3m
Gravitational Potential Energy
10m
Intro to Conservation of Energy
29m
Energy with Non-Conservative Forces
20m
Springs & Elastic Potential Energy
19m
Solving Projectile Motion Using Energy
13m
Motion Along Curved Paths
4m
Rollercoaster Problems
13m
Pendulum Problems
13m
Energy in Connected Objects (Systems)
24m
Force & Potential Energy
18m
11. Momentum & Impulse
3h 39m
Worksheet
Intro to Momentum
11m
Intro to Impulse
14m
Impulse with Variable Forces
11m
Intro to Conservation of Momentum
17m
Push-Away Problems
19m
Types of Collisions
4m
Completely Inelastic Collisions
28m
Adding Mass to a Moving System
8m
Collisions & Motion (Momentum & Energy)
26m
Ballistic Pendulum
14m
Collisions with Springs
13m
Elastic Collisions
24m
How to Identify the Type of Collision
9m
Intro to Center of Mass
15m
12. Rotational Kinematics
2h 59m
Worksheet
Rotational Position & Displacement
25m
More Connect Wheels (Bicycles)
29m
Rotational Velocity & Acceleration
20m
Equations of Rotational Motion
20m
Converting Between Linear & Rotational
26m
Types of Acceleration in Rotation
26m
Rolling Motion (Free Wheels)
16m
Intro to Connected Wheels
12m
13. Rotational Inertia & Energy
7h 4m
Worksheet
More Conservation of Energy Problems
54m
Conservation of Energy in Rolling Motion
45m
Parallel Axis Theorem
13m
Intro to Moment of Inertia
28m
Moment of Inertia via Integration
18m
Moment of Inertia of Systems
23m
Moment of Inertia & Mass Distribution
10m
Intro to Rotational Kinetic Energy
16m
Energy of Rolling Motion
18m
Types of Motion & Energy
24m
Conservation of Energy with Rotation
35m
Torque with Kinematic Equations
56m
Rotational Dynamics with Two Motions
51m
Rotational Dynamics of Rolling Motion
27m
14. Torque & Rotational Dynamics
2h 5m
Worksheet
Torque & Acceleration (Rotational Dynamics)
15m
How to Solve: Energy vs Torque
10m
Torque Due to Weight
23m
Intro to Torque
26m
Net Torque & Sign of Torque
13m
Torque on Discs & Pulleys
35m
15. Rotational Equilibrium
3h 41m
Worksheet
Equilibrium with Multiple Objects
30m
Equilibrium with Multiple Supports
15m
Center of Mass & Simple Balance
31m
Equilibrium in 2D - Ladder Problems
40m
Beam / Shelf Against a Wall
53m
More 2D Equilibrium Problems
14m
Review: Center of Mass
14m
Torque & Equilibrium
22m
16. Angular Momentum
3h 6m
Worksheet
Opening/Closing Arms on Rotating Stool
18m
Conservation of Angular Momentum
46m
Angular Momentum & Newton's Second Law
10m
Intro to Angular Collisions
15m
Jumping Into/Out of Moving Disc
23m
Spinning on String of Variable Length
20m
Angular Collisions with Linear Motion
8m
Intro to Angular Momentum
15m
Angular Momentum of a Point Mass
21m
Angular Momentum of Objects in Linear Motion
7m
17. Periodic Motion
2h 5m
Worksheet
Spring Force (Hooke's Law)
14m
Intro to Simple Harmonic Motion (Horizontal Springs)
30m
Energy in Simple Harmonic Motion
22m
Simple Harmonic Motion of Vertical Springs
19m
Simple Harmonic Motion of Pendulums
25m
Energy in Pendulums
12m
18. Waves & Sound
3h 41m
Worksheet
Intro to Waves
11m
Velocity of Transverse Waves
21m
Velocity of Longitudinal Waves
11m
Wave Functions
32m
Phase Constant
14m
Average Power of Waves on Strings
9m
Wave Intensity
19m
Sound Intensity
13m
Wave Interference
8m
Superposition of Wave Functions
3m
Standing Waves
30m
Standing Wave Functions
14m
Standing Sound Waves
12m
Beats
8m
The Doppler Effect
7m
19. Fluid Mechanics
4h 27m
Worksheet
Density
29m
Intro to Pressure
1m
Pascal's Law & Hydraulic Lift
28m
Pressure Gauge: Barometer
13m
Pressure Gauge: Manometer
14m
Pressure Gauge: U-shaped Tube
21m
Buoyancy & Buoyant Force
1m
Ideal vs Real Fluids
3m
Fluid Flow & Continuity Equation
21m
20. Heat and Temperature
3h 9m
Worksheet
Temperature
16m
Linear Thermal Expansion
14m
Volume Thermal Expansion
14m
Moles and Avogadro's Number
14m
Specific Heat & Temperature Changes
12m
Latent Heat & Phase Changes
16m
Intro to Calorimetry
21m
Calorimetry with Temperature and Phase Changes
15m
Advanced Calorimetry: Equilibrium Temperature with Phase Changes
9m
Phase Diagrams, Triple Points and Critical Points
6m
Heat Transfer
46m
21. Kinetic Theory of Ideal Gases
1h 50m
Worksheet
The Ideal Gas Law
32m
Kinetic-Molecular Theory of Gases
1m
Average Kinetic Energy of Gases
10m
Internal Energy of Gases
14m
Root-Mean-Square Velocity of Gases
15m
Mean Free Path of Gases
20m
Speed Distribution of Ideal Gases
15m
22. The First Law of Thermodynamics
1h 26m
Worksheet
Heat Equations for Special Processes & Molar Specific Heats
15m
First Law of Thermodynamics
22m
Work Done Through Multiple Processes
16m
Cyclic Thermodynamic Processes
20m
PV Diagrams & Work
12m
23. The Second Law of Thermodynamics
3h 11m
Worksheet
Heat Engines and the Second Law of Thermodynamics
31m
Heat Engines & PV Diagrams
18m
The Otto Cycle
28m
The Carnot Cycle
21m
Refrigerators
22m
Entropy and the Second Law of Thermodynamics
31m
Entropy Equations for Special Processes
24m
Statistical Interpretation of Entropy
11m
24. Electric Force & Field; Gauss' Law
3h 42m
Worksheet
Electric Charge
15m
Charging Objects
6m
Charging By Induction
3m
Conservation of Charge
5m
Coulomb's Law (Electric Force)
47m
Electric Field
40m
Electric Fields in Capacitors
16m
Electric Field Lines
16m
Dipole Moment
8m
Electric Fields in Conductors
7m
Electric Flux
21m
Gauss' Law
32m
25. Electric Potential
1h 51m
Worksheet
Electric Potential Energy
7m
Electric Potential
27m
Work From Electric Force
31m
Relationships Between Force, Field, Energy, Potential
25m
The ElectronVolt
5m
Equipotential Surfaces
13m
26. Capacitors & Dielectrics
2h 2m
Worksheet
Capacitors & Capacitance
8m
Parallel Plate Capacitors
19m
Energy Stored by Capacitor
15m
Capacitance Using Calculus
7m
Combining Capacitors in Series & Parallel
15m
Solving Capacitor Circuits
29m
Intro To Dielectrics
18m
How Dielectrics Work
2m
Dielectric Breakdown
4m
27. Resistors & DC Circuits
3h 7m
Worksheet
Intro to Current
6m
Resistors and Ohm's Law
14m
Power in Circuits
11m
Microscopic View of Current
8m
Combining Resistors in Series & Parallel
37m
Kirchhoff's Junction Rule
4m
Solving Resistor Circuits
31m
Kirchhoff's Loop Rule
1m
28. Magnetic Fields and Forces
2h 23m
Worksheet
Magnets and Magnetic Fields
21m
Summary of Magnetism Problems
9m
Force on Moving Charges & Right Hand Rule
26m
Circular Motion of Charges in Magnetic Fields
11m
Mass Spectrometer
33m
Magnetic Force on Current-Carrying Wire
22m
Force and Torque on Current Loops
17m
29. Sources of Magnetic Field
2h 33m
Worksheet
Magnetic Field Produced by Moving Charges
10m
Magnetic Field Produced by Straight Currents
28m
Magnetic Force Between Parallel Currents
12m
Magnetic Force Between Two Moving Charges
9m
Magnetic Field Produced by Loops and Solenoids
43m
Toroidal Solenoids aka Toroids
12m
Biot-Savart Law (Calculus)
18m
Ampere's Law (Calculus)
17m
30. Induction and Inductance
3h 38m
Worksheet
Intro to Induction
5m
Magnetic Flux
12m
Faraday's Law
28m
Lenz's Law
22m
Motional EMF
18m
Transformers
9m
Mutual Inductance
24m
Self Inductance
18m
Inductors
7m
LR Circuits
22m
LC Circuits
35m
LRC Circuits
14m
31. Alternating Current
2h 37m
Worksheet
Alternating Voltages and Currents
18m
RMS Current and Voltage
9m
Phasors
20m
Resistors in AC Circuits
9m
Phasors for Resistors
7m
Capacitors in AC Circuits
16m
Phasors for Capacitors
8m
Inductors in AC Circuits
13m
Phasors for Inductors
7m
Impedance in AC Circuits
18m
Series LRC Circuits
11m
Resonance in Series LRC Circuits
10m
Power in AC Circuits
5m
32. Electromagnetic Waves
2h 12m
Worksheet
Intro to Electromagnetic (EM) Waves
21m
The Electromagnetic Spectrum
7m
Intensity of EM Waves
22m
Wavefunctions of EM Waves
19m
Radiation Pressure
24m
Polarization & Polarization Filters
30m
The Doppler Effect of Light
6m
33. Geometric Optics
2h 56m
Worksheet
Ray Nature Of Light
10m
Reflection of Light
9m
Index of Refraction
16m
Refraction of Light & Snell's Law
22m
Total Internal Reflection
5m
Ray Diagrams For Mirrors
36m
Mirror Equation
19m
Refraction At Spherical Surfaces
9m
Ray Diagrams For Lenses
22m
Thin Lens And Lens Maker Equations
24m
34. Wave Optics
1h 15m
Worksheet
Diffraction
8m
Diffraction with Huygen's Principle
14m
Young's Double Slit Experiment
24m
Single Slit Diffraction
27m
35. Special Relativity
2h 10m
Worksheet
Inertial Reference Frames
14m
Special Vs. Galilean Relativity
17m
Consequences of Relativity
52m
Lorentz Transformations
45m
12. Rotational Kinematics
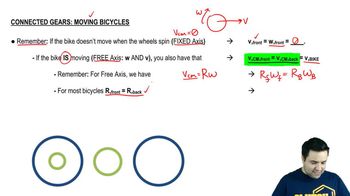
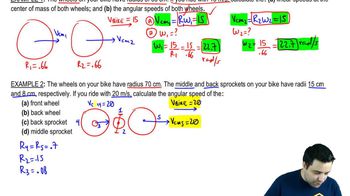
More Connect Wheels (Bicycles)
Next video
Physics
12. Rotational Kinematics
More Connect Wheels (Bicycles)
Video duration:
9m
Play a video:
Next video
Related Videos
Guided course
09:47
Bicycle Problems (Static)
Patrick Ford
1488
views
13
rank
1
comments
Guided course
07:09
RPM of pedals of static bicyle
Patrick Ford
903
views
11
rank
4
comments
Guided course
07:45
Bicycle Problems (Moving)
Patrick Ford
903
views
6
rank
Guided course
04:50
Angular speeds of moving bicyle
Patrick Ford
757
views
13
rank
Showing 1 of 4 videos
Load more videos



 09:47
09:47