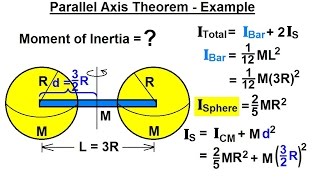
07:00Physics - Mechanics: Moment of Inertia (1 of 7) Parallel Axis Theorem: Example 1Michel van Biezen368views
11:34Parallel Axis Theorem & Moment of Inertia - Physics Practice ProblemsThe Organic Chemistry Tutor847views


 13:46
13:46