 Back
BackVector Functions and Space Curves: Calculus II Study Notes
Study Guide - Smart Notes
 Tailored notes based on your materials, expanded with key definitions, examples, and context.
Tailored notes based on your materials, expanded with key definitions, examples, and context.
Vector Functions
Definition and Basic Properties
Vector functions are functions that map a real variable to a vector in two or three dimensions. They are fundamental in describing motion and curves in space.
Position Vector: The position of a point P at time t is given by r(t) = x(t)i + y(t)j + z(t)k.
Velocity Vector: The velocity at time t is the derivative of the position vector: .
Acceleration Vector: The acceleration is the derivative of the velocity: .
Parameterization: The parameter t can represent time or simply label points along a curve.
Example: Calculating Velocity and Acceleration
Given r(t) = ti + t^2j + t^3k, the velocity and acceleration are:
Derivatives of Vector Expressions
Rules for Differentiation
The differentiation rules for vector functions are analogous to those for scalar functions:
Derivative of Vector Magnitude
The derivative of the magnitude of a vector function is:
Applications: Circular Motion and Newton's Laws
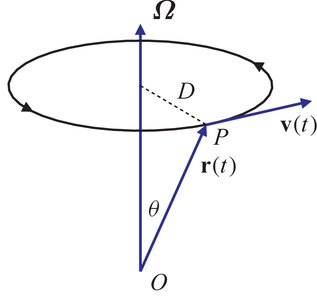
Circular Motion
For a particle moving in a circle, the velocity vector is tangent to the path and can be expressed using the cross product:
, where is the angular velocity vector.
The magnitude of the velocity is .
Newton's Second Law
Newton's second law relates force, mass, and acceleration for vector functions:
If mass is constant:
Angular Momentum and Rotating Reference Frames
Angular momentum and torque are defined using the cross product:
Angular momentum:
Torque:
In rotating frames, additional terms appear: Coriolis and centrifugal forces.
Space Curves and Arc Length
Parameterization and Types of Curves
Curves in space can be parameterized by any variable, not necessarily time. Curves may be closed, self-intersecting, or simple.
Arc Length of a Curve
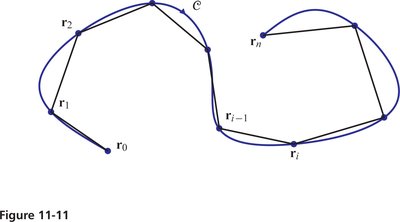
The arc length of a curve r(t) from a to b is given by:
Divide the interval into n subintervals and sum the lengths of the segments.
Arc Length Element
The differential arc length is:
For a curve given by :
Arc Length Parameterization
Any curve can be reparameterized by its arc length s:
In arc length parameterization, the speed is always 1.
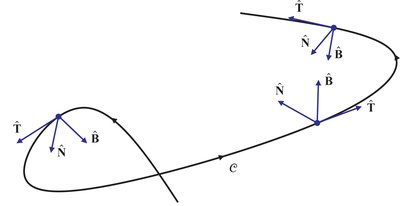
Frenet-Serret Formulas and Space Curve Geometry
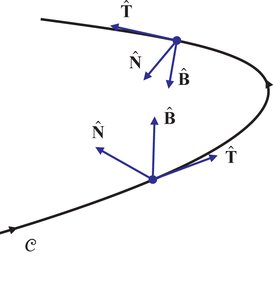
Tangent, Normal, and Binormal Vectors
At each point on a space curve, three orthogonal unit vectors can be defined:
Unit Tangent:
Unit Normal: , where is the curvature.
Unit Binormal:
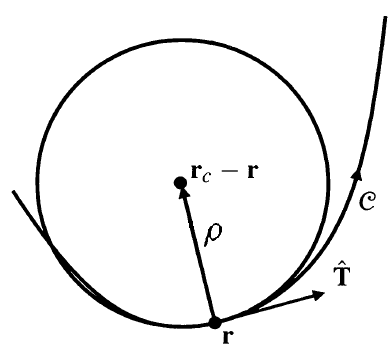
Curvature and Radius of Curvature
The curvature measures how sharply a curve bends at a point:
Radius of curvature:
Frenet Frame and Torsion
The Frenet frame consists of the tangent, normal, and binormal vectors. Torsion measures the rate at which the curve twists out of the plane:
If , the curve is planar.
Summary of Frenet-Serret Formulas
General Parameterizations and Torsion Formula
For general parameterizations, the torsion can be calculated using:
Example: For the curve , determine if it is arc length parameterized and compute the Frenet frame at each point.
