 Back
BackChapter 12: Torque and Rotational Dynamics – Study Notes
Study Guide - Smart Notes
 Tailored notes based on your materials, expanded with key definitions, examples, and context.
Tailored notes based on your materials, expanded with key definitions, examples, and context.
Chapter 12: Torque and Rotational Dynamics
12.1 Torque and Angular Momentum
Torque is the rotational analog of force and is responsible for causing changes in rotational motion. This section introduces the concept of torque, the factors influencing it, and its mathematical formulation.
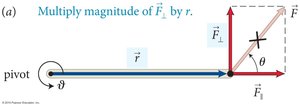
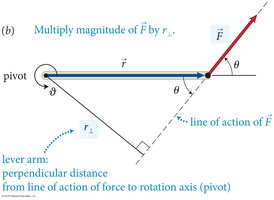
Torque (\( \tau \)): The measure of the tendency of a force to rotate an object about an axis.
Lever Arm (\( r_\perp \)): The perpendicular distance from the axis of rotation (pivot) to the line of action of the force.
Mathematical Expression:
\( \tau = r F_\perp = r F \sin \theta \)
\( \tau = r_\perp F = (r \sin \theta) F \)
Factors Affecting Torque:
Magnitude of the force (\( F \))
Distance from the pivot (\( r \))
Angle at which the force is applied (\( \theta \))
Sign of Torque: The direction (sign) of torque depends on the chosen positive direction for rotation. Conventionally, counterclockwise is positive, and clockwise is negative.
Rotational Equilibrium: For stationary objects, the sum of all torques is zero: \( \sum \tau = 0 \).

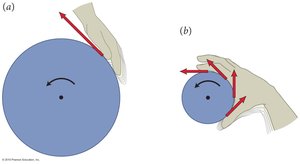

Example: Opening a Door
Pushing a door at its edge (far from the hinges) and perpendicular to its surface produces the greatest torque, making it easier to open.
12.2 Free Rotation and Center of Mass
When an object is free to rotate without external constraints, it rotates about its center of mass. The center of mass moves as if all the mass were concentrated at that point, following a parabolic trajectory under gravity.
Free Rotation: The axis of rotation is not fixed in space.
Center of Mass: The point where the mass of the object is considered to be concentrated for translational motion analysis.
All points away from the center of mass move in circles about the center of mass.

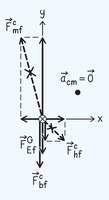
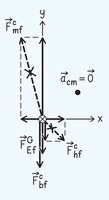
12.3 Extended Free-Body Diagrams
Extended free-body diagrams are used to analyze forces and torques acting on objects, especially when considering rotation about a point.
Procedure:
Draw a standard free-body diagram to identify all forces.
Draw a cross-section in the plane of rotation.
Choose a reference point (pivot, hinge, or center of mass).
Draw vectors for all forces, indicating their points of application.
Indicate rotational acceleration (\( \alpha \)) if present.
Forces exerted at the reference point cause no torque about that point.
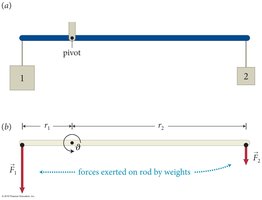
Example: Balancing a Measuring Stick
A 1-kg rock is suspended from one end of a 1-m stick. If the stick is balanced at the 0.25-m mark, the mass of the stick can be determined using the condition for rotational equilibrium (\( \sum \tau = 0 \)).
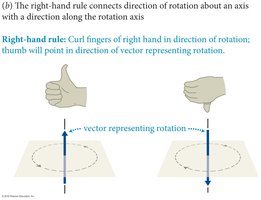
12.4 The Vector Nature of Rotation
Rotational motion in three dimensions is described using vectors. The direction of rotation is determined by the right-hand rule.
Right-Hand Rule: Curl the fingers of your right hand in the direction of rotation; your thumb points in the direction of the rotation vector.
Rotation Vectors: Quantities such as angular displacement (\( \Delta \theta \)), angular velocity (\( \omega \)), and angular acceleration (\( \alpha \)) are vectors.
Non-commutativity: Rotational displacements do not generally commute (order matters), except for infinitesimal rotations.
12.5 Conservation of Angular Momentum
Angular momentum is conserved in a system with no net external torque. The rotational analog of Newton's second law relates torque to angular acceleration.
Angular Momentum (\( L \)): For a rigid body, \( L = I \omega \), where \( I \) is the moment of inertia and \( \omega \) is angular velocity.
Newton's Second Law for Rotation: \( \sum \tau = I \alpha \)
Conservation Law: If \( \sum \tau_{ext} = 0 \), then \( L \) is constant.
Rotational Impulse (\( J \)): The change in angular momentum due to external torques over a time interval.
Example: Figure Skater
When a skater pulls in her arms, her moment of inertia decreases and her angular velocity increases, conserving angular momentum. Her rotational kinetic energy increases because she spins faster.
12.6 Rolling Motion
Rolling motion combines rotational and translational motion. For rolling without slipping, the velocity of the center of mass is related to the angular velocity by \( v_{cm} = R \omega \).
Rolling Without Slipping: The point of contact with the surface has zero instantaneous velocity.
Static Friction: Provides the torque necessary for rolling without slipping.
Kinetic Energy: The total kinetic energy is the sum of translational and rotational kinetic energies.
Example: Rolling Ball Down an Incline
The acceleration and frictional force can be found using Newton's second law for both translation and rotation, considering the moment of inertia for a solid sphere.
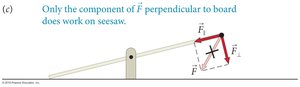
12.7 Torque and Energy
Torque causes changes in rotational kinetic energy. The work done by torque is analogous to the work done by force in linear motion.
Rotational Work: \( W = \tau \Delta \theta \)
Rotational Kinetic Energy: \( K_{rot} = \frac{1}{2} I \omega^2 \)
Total Kinetic Energy (Rolling): \( K_{total} = \frac{1}{2} M v_{cm}^2 + \frac{1}{2} I \omega^2 \)
12.8 The Vector Product
The vector (cross) product is used to define torque and angular momentum as vectors. The result is a vector perpendicular to the plane formed by the two input vectors.
Vector Product: \( \vec{A} \times \vec{B} = |A||B|\sin\theta \hat{n} \), where \( \hat{n} \) is a unit vector perpendicular to both \( \vec{A} \) and \( \vec{B} \).
Torque as a Vector: \( \vec{\tau} = \vec{r} \times \vec{F} \)
Angular Momentum as a Vector: \( \vec{L} = \vec{r} \times \vec{p} \)
Table: Translational vs. Rotational Dynamics
Translational | Rotational |
|---|---|
Force (\( F \)) | Torque (\( \tau \)) |
Mass (\( m \)) | Moment of Inertia (\( I \)) |
Acceleration (\( a \)) | Angular Acceleration (\( \alpha \)) |
Momentum (\( p \)) | Angular Momentum (\( L \)) |
Summary of Key Equations
\( \tau = r F \sin \theta \)
\( \sum \tau = I \alpha \)
\( L = I \omega \)
\( \Delta L = J = \int \tau dt \)
\( v_{cm} = R \omega \) (rolling without slipping)
\( K_{total} = \frac{1}{2} M v_{cm}^2 + \frac{1}{2} I \omega^2 \)
Additional info: These notes expand on the provided slides by including definitions, formulas, and examples for clarity and completeness, as would be expected in a mini-textbook chapter for college physics students.
