 Back
BackDynamics of Rotational Motion: Torque, Angular Acceleration, and Applications
Study Guide - Smart Notes
 Tailored notes based on your materials, expanded with key definitions, examples, and context.
Tailored notes based on your materials, expanded with key definitions, examples, and context.
Dynamics of Rotational Motion
Introduction to Rotational Motion
Rotational motion describes the movement of objects around a fixed axis. This chapter explores the dynamics of rotational motion, focusing on angular quantities, the relationship between torque and angular acceleration, and the physical meaning of moment of inertia.
Angular Position (\(\theta\)): The angle an object rotates through, measured in radians.
Angular Displacement (\(\Delta \theta\)): The change in angular position.
Angular Velocity (\(\omega\)): The rate of change of angular position, \(\omega = \frac{d\theta}{dt}\) (unit: rad/s).
Angular Acceleration (\(\alpha\)): The rate of change of angular velocity, \(\alpha = \frac{d\omega}{dt}\) (unit: rad/s2).
Equations of Motion with Constant Angular Acceleration
When angular acceleration is constant, the following equations describe the motion:
\(\omega = \omega_0 + \alpha t\)
\(\theta = \theta_0 + \omega_0 t + \frac{1}{2} \alpha t^2\)
\(\omega^2 = \omega_0^2 + 2\alpha (\theta - \theta_0)\)
\(\theta - \theta_0 = \frac{1}{2}(\omega + \omega_0)t\)
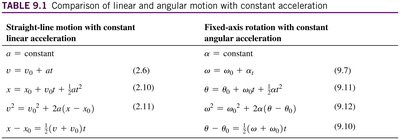
Straight-line motion with constant linear acceleration | Fixed-axis rotation with constant angular acceleration |
|---|---|
\(a = \text{constant}\) | \(\alpha = \text{constant}\) |
\(v = v_0 + at\) | \(\omega = \omega_0 + \alpha t\) |
\(x = x_0 + v_0 t + \frac{1}{2} a t^2\) | \(\theta = \theta_0 + \omega_0 t + \frac{1}{2} \alpha t^2\) |
\(v^2 = v_0^2 + 2a(x-x_0)\) | \(\omega^2 = \omega_0^2 + 2\alpha (\theta - \theta_0)\) |
\(x - x_0 = \frac{1}{2}(v + v_0)t\) | \(\theta - \theta_0 = \frac{1}{2}(\omega + \omega_0)t\) |
Linear vs. Angular Quantities
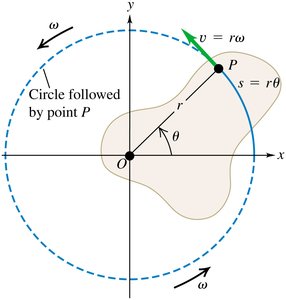
Linear and angular quantities are related for points at a distance \(r\) from the axis of rotation:
Linear velocity: \(v = r\omega\)
Linear acceleration: \(a = r\alpha\)
Kinetic Energy in Rotational Motion
The kinetic energy of a rotating rigid body depends on its moment of inertia and angular velocity:
Rotational kinetic energy: \(K = \frac{1}{2} I \omega^2\)
If the body also translates, total kinetic energy is the sum of translational and rotational parts.
Moment of Inertia
The moment of inertia (\(I\)) quantifies how mass is distributed relative to the axis of rotation. It plays a similar role in rotational motion as mass does in linear motion.
Definition: \(I = \sum m_i r_i^2\) for discrete masses, or \(I = \int r^2 dm\) for continuous bodies.
Depends on both the mass and its distribution relative to the axis.
Torque
Torque is the rotational equivalent of force. It measures the tendency of a force to rotate an object about an axis.
Definition: \(\tau = r F \sin \phi\), where \(r\) is the distance from the axis, \(F\) is the force, and \(\phi\) is the angle between \(\vec{r}\) and \(\vec{F}\).
Unit: Newton-meter (N·m). Not called a joule, despite having the same units as energy.
Sign convention: Counterclockwise torques are positive; clockwise torques are negative.
Calculating Torque
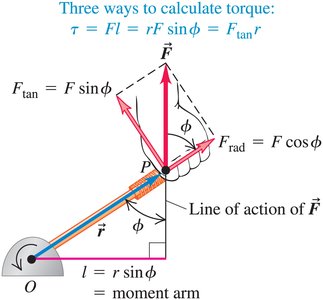
There are several equivalent ways to calculate torque:
\(\tau = r F \sin \phi\)
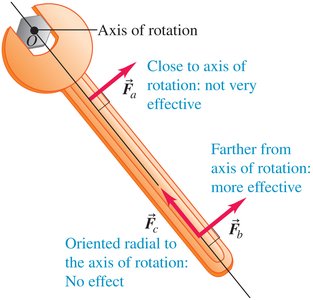
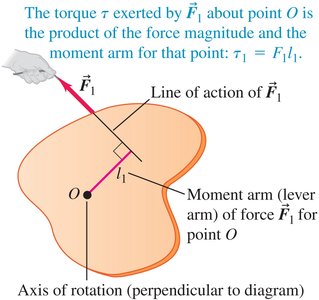
\(\tau = F l\), where \(l\) is the moment arm (perpendicular distance from axis to line of action of force)
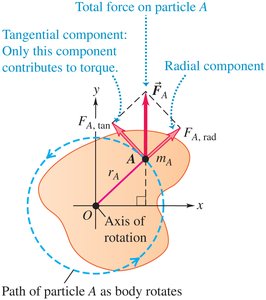
Only the tangential component of force contributes to torque: \(\tau = F_{\text{tan}} r\)
Example: Calculating Torque
A plumber applies a force of 900 N at the end of a wrench 0.80 m from the pivot, at an angle of 19° with the horizontal. The torque is:
\(\tau = r F \sin \phi = (0.80\,\text{m})(900\,\text{N}) \sin 19^\circ\)
Calculate the magnitude and assign the sign based on the direction (counterclockwise is positive).
Torque and Angular Acceleration (Newton's Second Law for Rotation)
The net torque acting on a rigid body about a fixed axis is equal to the product of the moment of inertia and the angular acceleration:
\(\sum \tau = I \alpha\)
Both torque and moment of inertia depend on the axis of rotation.
Units: \(\alpha\) in rad/s2, \(I\) in kg·m2, torque in N·m.
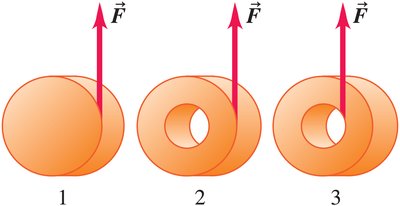
Ranking Angular Accelerations
When comparing objects with different mass distributions and points of force application, the angular acceleration produced by the same force depends on both the moment of inertia and the radius at which the force is applied.
For three cylinders (solid and hollow) with forces applied at different radii, rank their angular accelerations using \(\alpha = \frac{\tau}{I}\).
Summary Table: Moments of Inertia for Common Shapes
Shape | Moment of Inertia (I) |
|---|---|
Slender rod, axis through center | \(I = \frac{1}{12}ML^2\) |
Slender rod, axis through end | \(I = \frac{1}{3}ML^2\) |
Rectangular plate, axis through center | \(I = \frac{1}{12}M(L^2 + b^2)\) |
Thin rectangular plate, axis along edge | \(I = \frac{1}{3}ML^2\) |
Hollow cylinder | \(I = M(R_1^2 + R_2^2)/2\) |
Solid cylinder | \(I = \frac{1}{2}MR^2\) |
Thin-walled hollow cylinder | \(I = MR^2\) |
Solid sphere | \(I = \frac{2}{5}MR^2\) |
Thin-walled hollow sphere | \(I = \frac{2}{3}MR^2\) |
Key Takeaways
Torque is the rotational analog of force and depends on both the magnitude of the force and its distance from the axis of rotation.
The moment of inertia quantifies how mass is distributed relative to the axis and determines how much torque is needed for a given angular acceleration.
Newton's second law for rotation relates net torque, moment of inertia, and angular acceleration: \(\sum \tau = I \alpha\).
