 Back
BackChapter 10 Rotation and torque
Study Guide - Smart Notes
 Tailored notes based on your materials, expanded with key definitions, examples, and context.
Tailored notes based on your materials, expanded with key definitions, examples, and context.
Fixed-Axis Rotation
Introduction to Rotational Motion
Rotational motion involves the movement of objects around a fixed axis. This type of motion is fundamental in physics and engineering, as it describes the behavior of wheels, gears, and many mechanical systems. The study of fixed-axis rotation connects linear and angular quantities, allowing for the analysis of rotational analogs to displacement, velocity, and acceleration.
Relationship Between Displacement, Velocity, and Acceleration
In rotational motion, angular displacement (\( \theta \)), angular velocity (\( \omega \)), and angular acceleration (\( \alpha \)) are the rotational counterparts to linear displacement (\( s \)), velocity (\( v \)), and acceleration (\( a \)). The relationships are:
Angular Displacement (\( \theta \)): The angle through which a point or line has been rotated in a specified sense about a specified axis.
Angular Velocity (\( \omega \)): The rate of change of angular displacement with respect to time.
Angular Acceleration (\( \alpha \)): The rate of change of angular velocity with respect to time.
The mathematical relationships are:
\( \omega = \frac{d\theta}{dt} \)
\( \alpha = \frac{d\omega}{dt} = \frac{d^2\theta}{dt^2} \)
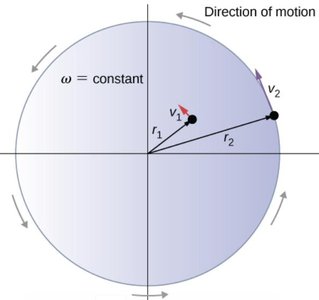
Describing Circular Motion
Circular motion occurs when an object moves along a circular path. The velocity vector is always tangent to the path, and the acceleration has both tangential and radial (centripetal) components. For uniform circular motion (constant \( \omega \)), the magnitude of the velocity is constant, but its direction changes continuously.
Tangential velocity: \( v = r\omega \)
Centripetal acceleration: \( a_c = \frac{v^2}{r} = r\omega^2 \)
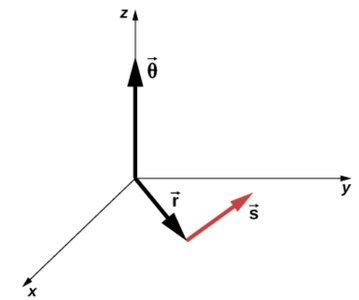
Rotational Motion and Translational Motion
Rotational motion can be related to translational motion through analogous quantities. The position vector \( \vec{r} \) and the arc length \( \vec{s} \) are used to describe the position of a point on a rotating body. The direction of angular displacement is given by the right-hand rule.
Angular Velocity and Angular Acceleration
Angular velocity (\( \vec{\omega} \)) is a vector quantity, with direction given by the axis of rotation (right-hand rule). Angular acceleration (\( \vec{\alpha} \)) describes how quickly the angular velocity changes.
\( \vec{\omega} = \frac{d\vec{\theta}}{dt} \)
\( \vec{\alpha} = \frac{d\vec{\omega}}{dt} \)
For constant angular acceleration, the kinematic equations for rotation are:
\( \omega = \omega_0 + \alpha t \)
\( \theta = \theta_0 + \omega_0 t + \frac{1}{2}\alpha t^2 \)
\( \omega^2 = \omega_0^2 + 2\alpha (\theta - \theta_0) \)
Cross Products in Rotational Motion
Many rotational quantities are defined using the cross product. For example, the linear velocity \( \vec{v} \) of a point at position \( \vec{r} \) on a rotating body is given by:
\( \vec{v} = \vec{\omega} \times \vec{r} \)
Rotational Kinetic Energy
Rotational kinetic energy is the energy due to the rotation of an object and is given by:
\( K_{rot} = \frac{1}{2}I\omega^2 \)
where \( I \) is the moment of inertia and \( \omega \) is the angular velocity.
Moment of Inertia
The moment of inertia (\( I \)) is the rotational analog of mass in linear motion. It depends on the mass distribution relative to the axis of rotation:
\( I = \sum_j m_j r_j^2 \)
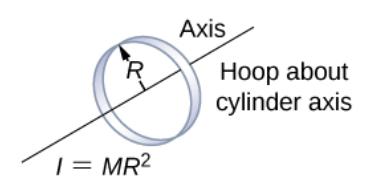
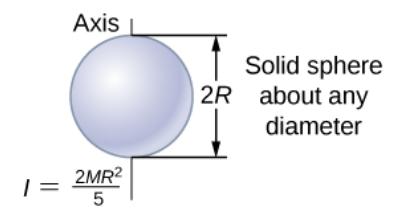
Common moments of inertia:
Object | Moment of Inertia (I) |
|---|---|
Hoop about cylinder axis | \( I = MR^2 \) |
Solid sphere about any diameter | \( I = \frac{2}{5}MR^2 \) |
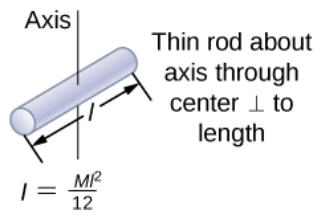
Thin rod about center (perpendicular to length) | \( I = \frac{1}{12}ML^2 \) |
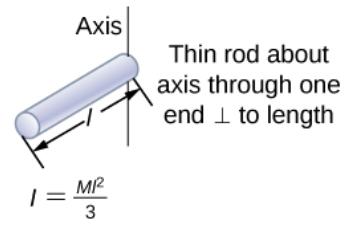
Thin rod about end (perpendicular to length) | \( I = \frac{1}{3}ML^2 \) |
Rotational vs. Translational Quantities
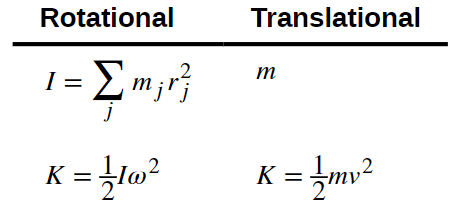
The following table summarizes the analogies between rotational and translational motion:
Rotational | Translational | |
|---|---|---|
Inertia | \( I = \sum_j m_j r_j^2 \) | \( m \) |
Kinetic Energy | \( K = \frac{1}{2}I\omega^2 \) | \( K = \frac{1}{2}mv^2 \) |
Torque
Torque (\( \tau \)) is the rotational analog of force. It measures the tendency of a force to rotate an object about an axis. The magnitude of torque is given by:
\( \tau = rF\sin\theta \)
where \( r \) is the distance from the axis of rotation to the point of application of the force, \( F \) is the magnitude of the force, and \( \theta \) is the angle between \( \vec{r} \) and \( \vec{F} \).
Newton's Second Law for Rotation
Newton's second law for rotation relates the net torque acting on a body to its angular acceleration:
\( \sum \tau = I\alpha \)
This equation is the rotational analog of \( F = ma \) in linear motion.
Work and Energy in Rotational Motion
The work done by a torque in rotating an object through an angle \( \theta \) is:
\( W = \tau \theta \)
The work-energy theorem for rotation states that the net work done by torques is equal to the change in rotational kinetic energy:
\( W_{net} = \Delta K_{rot} = \frac{1}{2}I\omega^2 - \frac{1}{2}I\omega_0^2 \)
Applications and Example Problems
Several example problems illustrate the application of these concepts:
Example 1: Calculating angular velocity, direction, radians swept, and tangential speed for a rotating flywheel.
Example 2: Determining average angular acceleration and stopping time for a spinning bicycle wheel.
Example 3: Comparing rotational and translational kinetic energy in helicopter blades.
Example 4: Finding the net torque on a flywheel due to multiple forces.
Example 5: Calculating angular acceleration of a merry-go-round with and without a child sitting at a distance from the center.
Example 6: Determining the angular velocity of a flywheel after a given torque is applied through a specified angle.





Additional info: The above examples are representative of typical problems encountered in introductory physics courses on rotational dynamics. They require the application of the equations and concepts discussed in this summary.
