 Back
BackKinematics and Dynamics of Rotating and Moving Systems
Study Guide - Smart Notes
 Tailored notes based on your materials, expanded with key definitions, examples, and context.
Tailored notes based on your materials, expanded with key definitions, examples, and context.
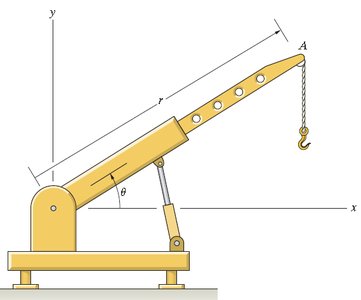
Q1. Determine the magnitudes of the velocity and acceleration of point P. The lengths and are fixed. Also, identify the expressions for the centripetal acceleration, tangential acceleration, and Coriolis acceleration.
Background
Topic: Kinematics of Rotating Systems
This question tests your understanding of the velocity and acceleration of a point in a rotating and translating mechanism, specifically an industrial robot arm. You are also asked to identify the different types of acceleration present in such systems.

Key Terms and Formulas
Velocity (): The rate of change of position of point P.
Acceleration (): The rate of change of velocity of point P.
Centripetal acceleration:
Tangential acceleration: (where is angular acceleration)
Coriolis acceleration:
Step-by-Step Guidance
Identify the position vector of point P in terms of the given variables (, , ).
Express the velocity of point P by differentiating the position vector with respect to time, considering both the rotation and translation.
Express the acceleration of point P by differentiating the velocity vector with respect to time. Separate the acceleration into components: centripetal, tangential, and Coriolis.
Write the mathematical expressions for each acceleration component using the provided variables.
Try solving on your own before revealing the answer!
Final Answer:
The velocity and acceleration magnitudes are given by:
Centripetal acceleration: Tangential acceleration: Coriolis acceleration:
These expressions account for the fixed lengths and and the time derivatives of and .
Q2. The point A of the system has polar coordinates varying with time: [m], [rad]. Calculate the velocity and acceleration of point A. For , , , , plot the trajectory of A for in the following cases: (a) , (b) , , (c) , $\gamma_2 = 1$, (d) , $\gamma_2 = 1$, (e) , $\gamma_2 = 1$. Comment on the periodicity of the trajectory in each case.
Background
Topic: Kinematics in Polar Coordinates
This question tests your ability to compute velocity and acceleration in polar coordinates, and to analyze the periodicity of a trajectory based on the time dependence of and .
Key Terms and Formulas
Velocity in polar coordinates:
Acceleration in polar coordinates:
Periodicity: The trajectory is periodic if both and repeat after a certain time interval.
Step-by-Step Guidance
Compute and by differentiating with respect to time.
Compute and by differentiating with respect to time.
Substitute these derivatives into the velocity and acceleration formulas for polar coordinates.
Set the given values for , , , and analyze the periodicity for each case of and .
Try solving on your own before revealing the answer!
Final Answer:
Velocity: Acceleration:
For each case, the periodicity depends on the ratio of to . If both are integers and equal, the trajectory is periodic. If $\gamma_1$ is irrational (e.g., ), the trajectory is not periodic.
Q3. The position of the moving suspension point of a simple pendulum is given by . Express the kinematic quantities (position, velocity, and acceleration) of the pendulum’s mass point P: 1) in the frame , 2) in the frame .
Background
Topic: Kinematics of a Moving Pendulum
This question tests your ability to express the position, velocity, and acceleration of a pendulum whose suspension point is itself moving, in both Cartesian and polar coordinate frames.
Key Terms and Formulas
Position in Cartesian coordinates:
Velocity:
Acceleration:
Position in polar coordinates:
Velocity in polar coordinates:
Acceleration in polar coordinates:
Step-by-Step Guidance
Write the position vector of point P in the frame by adding the position of the suspension point and the pendulum length.
Differentiate the position vector with respect to time to obtain the velocity in the frame.
Differentiate the velocity vector with respect to time to obtain the acceleration in the frame.
Express the position, velocity, and acceleration in the frame using the polar coordinate formulas.
Try solving on your own before revealing the answer!
Final Answer:
In the frame: Position: Velocity: Acceleration:
In the frame: Position: Velocity: Acceleration:
