 Back
BackMotion in a Plane: Vectors, Forces, Friction, and Work
Study Guide - Smart Notes
 Tailored notes based on your materials, expanded with key definitions, examples, and context.
Tailored notes based on your materials, expanded with key definitions, examples, and context.
Chapter 10: Motion in a Plane
10.1 Straight is a Relative Term
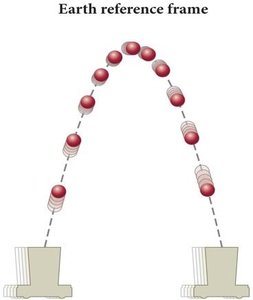
Motion in two dimensions depends on the observer's reference frame. The trajectory of a free-falling object can appear different depending on whether the observer is stationary or moving.
Reference Frame: The perspective from which motion is observed and measured.
Example: A ball dropped from a moving cart appears to follow a straight path downward in the cart's frame, but a parabolic path in the Earth's frame.

10.2 Vectors in a Plane
Vectors are essential for describing motion in two dimensions. Displacement, velocity, and acceleration are all vector quantities and can be decomposed into components along perpendicular axes.
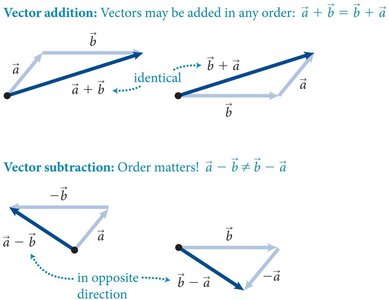
Vector Addition: Place the tail of the second vector at the head of the first; the resultant vector is from the tail of the first to the head of the second.
Vector Subtraction: Reverse the direction of the vector to be subtracted and add it to the first vector.
Commutativity: Vector addition is commutative (a + b = b + a), but vector subtraction is not (a - b ≠ b - a).
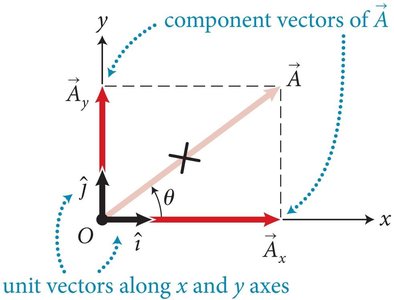
Component Form: Any vector \( \vec{A} \) can be written as \( \vec{A} = A_x \hat{i} + A_y \hat{j} \).
Magnitude: \( A = \sqrt{A_x^2 + A_y^2} \)
Direction: \( \tan \theta = \frac{A_y}{A_x} \)
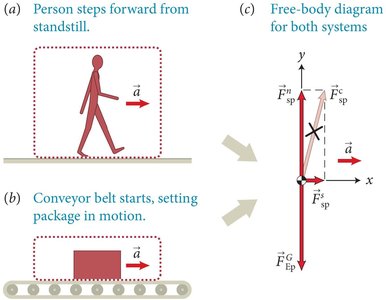
10.3 Decomposition of Forces
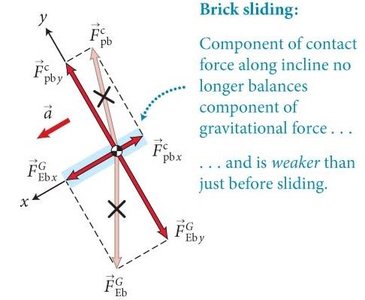
Forces acting on objects on inclined planes can be decomposed into components parallel (tangential) and perpendicular (normal) to the surface. Choosing axes aligned with the direction of acceleration simplifies analysis.
Tangential Component: Parallel to the surface, responsible for motion along the incline.
Normal Component: Perpendicular to the surface, responsible for the normal force.
10.4 Friction
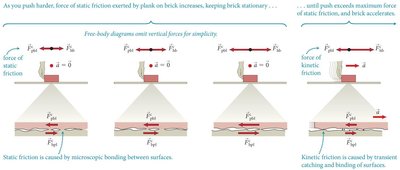
Friction arises from the interaction between surfaces in contact. It opposes relative motion and can be classified as static or kinetic friction.
Static Friction: Prevents relative motion up to a maximum value; proportional to the normal force.
Kinetic Friction: Acts when surfaces slide past each other; usually less than maximum static friction.
Microscopic Origin: Caused by bonds and interlocking between surface irregularities.
Normal Force: The perpendicular contact force balancing gravity.

10.5 Work and Friction
Work is done when a force causes displacement. Static friction does not dissipate energy, while kinetic friction does, converting mechanical energy into thermal energy.
Work by Friction: Only kinetic friction causes energy dissipation.
Work by Gravity: Independent of the path taken; depends only on vertical displacement.
10.6 Vector Algebra
Vectors can be represented in rectangular (Cartesian) or polar coordinates. Conversion between these systems uses trigonometric relationships.
Rectangular Coordinates: \( (x, y) \)
Polar Coordinates: \( (r, \theta) \), where \( r = \sqrt{x^2 + y^2} \), \( \theta = \tan^{-1}(y/x) \)
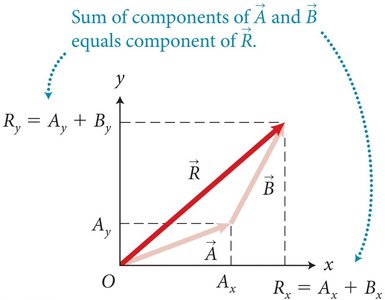
Component Addition: \( R_x = A_x + B_x \), \( R_y = A_y + B_y \)
10.7 Projectile Motion in Two Dimensions
Projectile motion is analyzed by decomposing it into horizontal and vertical components. The horizontal motion has constant velocity, while the vertical motion has constant acceleration due to gravity.
Equations of Motion:
\( x_f = x_i + v_{x,i} \Delta t \)
\( y_f = y_i + v_{y,i} \Delta t - \frac{1}{2}g(\Delta t)^2 \)
\( v_{y,f} = v_{y,i} - g\Delta t \)
Path Shape: The trajectory is a parabola.
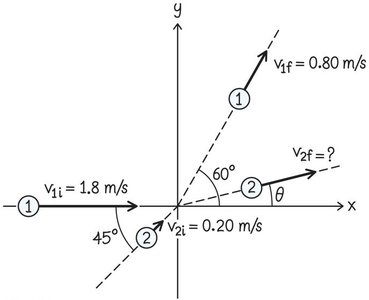
10.8 Collisions and Momentum in Two Dimensions
Momentum is conserved in both the x and y directions during collisions in two dimensions. The analysis involves breaking the momentum vectors into components and applying conservation laws to each direction.
Conservation Equations:
\( \Delta p_x = m_1(v_{1x,f} - v_{1x,i}) + m_2(v_{2x,f} - v_{2x,i}) = 0 \)
\( \Delta p_y = m_1(v_{1y,f} - v_{1y,i}) + m_2(v_{2y,f} - v_{2y,i}) = 0 \)
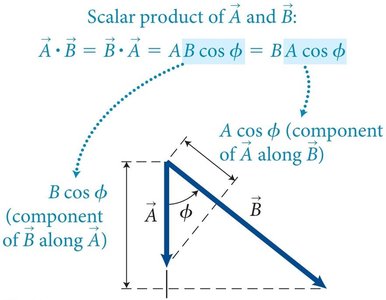
10.9 Work as the Product of Two Vectors (Dot Product)
The work done by a force is the dot product of the force vector and the displacement vector. The dot product is zero if the vectors are perpendicular.
Dot Product: \( \vec{A} \cdot \vec{B} = AB \cos \phi \), where \( \phi \) is the angle between the vectors.
Work: \( W = \vec{F} \cdot \Delta \vec{r} \)
10.10 Coefficients of Friction
The maximum static friction force is proportional to the normal force, with the proportionality constant called the coefficient of static friction (\( \mu_s \)). The coefficient of kinetic friction (\( \mu_k \)) is used when objects are sliding.
Static Friction: \( F_{s,\text{max}} = \mu_s F_n \)
Kinetic Friction: \( F_k = \mu_k F_n \), where \( \mu_k < \mu_s \)
Summary Table: Key Equations and Concepts
Concept | Equation | Description |
|---|---|---|
Vector Magnitude | Magnitude from components | |
Vector Direction | Angle with x-axis | |
Projectile Motion (x) | Horizontal position | |
Projectile Motion (y) | Vertical position | |
Static Friction | Maximum static friction | |
Kinetic Friction | Kinetic friction force | |
Work (dot product) | Work done by a force | |
Momentum Conservation (x) | Conservation in x-direction | |
Momentum Conservation (y) | Conservation in y-direction |
