 Back
BackMotion in Two or Three Dimensions: Structured Study Notes
Study Guide - Smart Notes
 Tailored notes based on your materials, expanded with key definitions, examples, and context.
Tailored notes based on your materials, expanded with key definitions, examples, and context.
Motion in Two or Three Dimensions
Introduction to Multidimensional Motion
Motion in two or three dimensions extends the concepts of kinematics beyond straight-line paths, allowing us to analyze the behavior of objects such as projectiles, roller coasters, and circling birds. Understanding these motions requires the use of vectors to describe position, velocity, and acceleration.

Position Vector
The position vector \( \vec{r} \) describes the location of a particle relative to the origin in a coordinate system. It has components along the x, y, and z axes:
Definition: \( \vec{r} = x \hat{i} + y \hat{j} + z \hat{k} \)
Application: Used to specify the exact location of an object in space at any given time.
Example: The position of a particle at point P with coordinates (x, y, z).

Velocity
Velocity is a vector quantity that describes the rate of change of position with respect to time. It can be average or instantaneous:
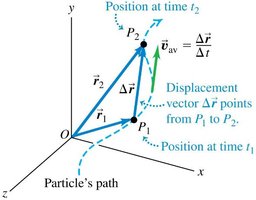
Average velocity: \( \vec{v}_{\text{av}} = \frac{\Delta \vec{r}}{\Delta t} \)
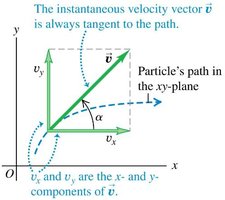
Instantaneous velocity: \( \vec{v} = \lim_{\Delta t \to 0} \frac{\Delta \vec{r}}{\Delta t} = \frac{d\vec{r}}{dt} \)
Direction: Always tangent to the particle's path.

Average Velocity
The average velocity is determined by the displacement between two points divided by the time interval. It points in the same direction as the displacement vector.
Formula: \( \vec{v}_{\text{av}} = \frac{\Delta \vec{r}}{\Delta t} \)
Example: Displacement from point P1 to P2 along a particle's path.
Instantaneous Velocity
The instantaneous velocity is the rate of change of the position vector at a specific moment. Its components are the derivatives of position with respect to time:
Components: \( v_x = \frac{dx}{dt}, \ v_y = \frac{dy}{dt}, \ v_z = \frac{dz}{dt} \)
Direction: Always tangent to the path in the plane of motion.
Acceleration
Acceleration describes how velocity changes with time. It can be average or instantaneous:
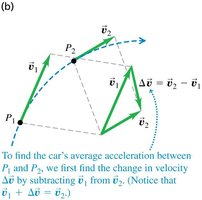
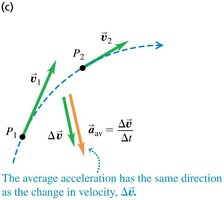
Average acceleration: \( \vec{a}_{\text{av}} = \frac{\Delta \vec{v}}{\Delta t} \)
Instantaneous acceleration: \( \vec{a} = \lim_{\Delta t \to 0} \frac{\Delta \vec{v}}{\Delta t} = \frac{d\vec{v}}{dt} \)

Average Acceleration
The change in velocity between two points is determined by vector subtraction. The average acceleration points in the direction of the change in velocity.
Formula: \( \vec{a}_{\text{av}} = \frac{\Delta \vec{v}}{\Delta t} \)
Example: Calculating the change in velocity as a car rounds a curve.
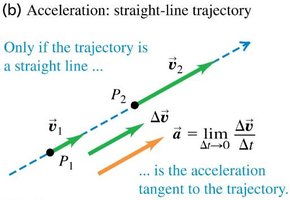
Instantaneous Acceleration
The instantaneous acceleration vector does not have to be tangent to the path. For curved paths, it points toward the concave side of the trajectory.
Curved trajectory: Acceleration points toward the inside of the curve.
Straight-line trajectory: Acceleration is tangent to the path.

Components of Acceleration
Each component of a particle's instantaneous acceleration vector equals the instantaneous rate of change of its corresponding velocity component:
\( a_x = \frac{dv_x}{dt} \)
\( a_y = \frac{dv_y}{dt} \)
\( a_z = \frac{dv_z}{dt} \)

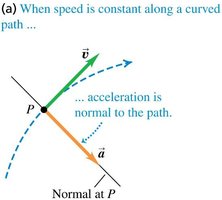
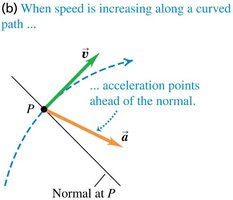
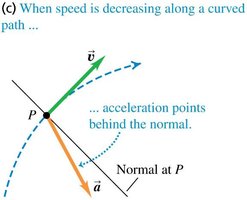
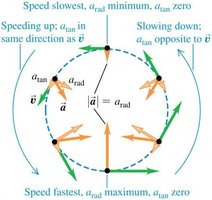
Parallel and Perpendicular Components of Acceleration
Acceleration can be decomposed into components parallel and perpendicular to the velocity vector:
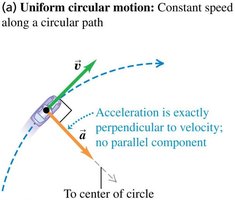
Constant speed: Acceleration is normal (perpendicular) to the path.
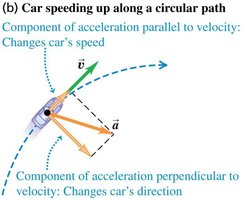
Increasing speed: Acceleration points ahead of the normal.
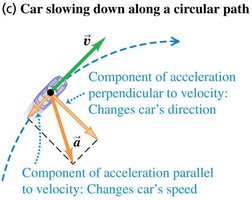
Decreasing speed: Acceleration points behind the normal.
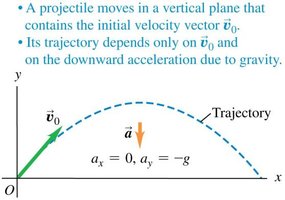
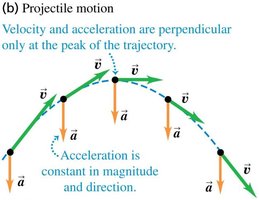
Projectile Motion
A projectile is any object given an initial velocity and then follows a path determined by gravity and air resistance. Neglecting air resistance, projectile motion can be analyzed as horizontal motion with constant velocity and vertical motion with constant acceleration.
Trajectory: Parabolic if air resistance is negligible.
Key equations:
\( x = v_{0x} t \)
\( y = v_{0y} t - \frac{1}{2} g t^2 \)


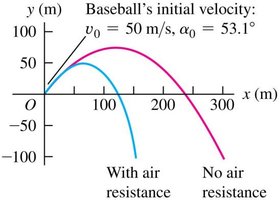
The Effects of Air Resistance
Air resistance complicates projectile motion, causing acceleration to vary and reducing maximum height and range. The trajectory is no longer a parabola.
Example: Comparison of baseball trajectories with and without air resistance.
Motion in a Circle
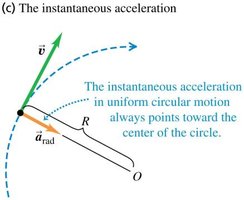
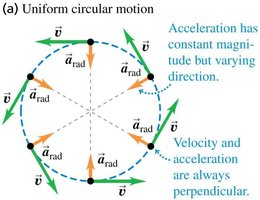
Motion in a circle can be uniform (constant speed) or nonuniform (varying speed). Uniform circular motion features constant speed and a centripetal acceleration directed toward the center of the circle.
Uniform circular motion:
Acceleration is perpendicular to velocity.
\( a_{\text{rad}} = \frac{v^2}{R} \)
Period \( T \): Time for one revolution.
Nonuniform circular motion:
Radial acceleration component: \( a_{\text{rad}} \)
Tangential acceleration component: \( a_{\text{tan}} \)

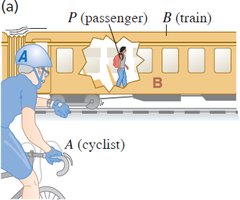
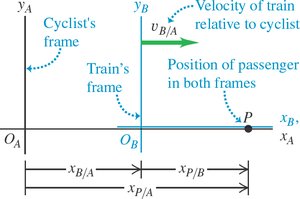
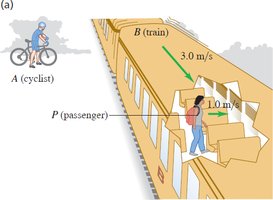
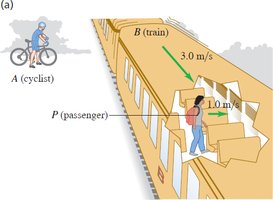
Relative Velocity
Relative velocity is the velocity of a moving object as seen by a particular observer, depending on the observer's frame of reference. In one dimension, the velocity of point P relative to frame A is:
\( v_{P/A} = v_{P/B} + v_{B/A} \)
Frame of reference: A coordinate system plus a time scale.
Relative Velocity in Two or Three Dimensions
Relative velocity in higher dimensions is determined by vector addition. The velocity of an object relative to a frame is the sum of its velocity relative to another frame and the velocity of that frame relative to the observer.
Vector addition: \( \vec{v}_{P/A} = \vec{v}_{P/B} + \vec{v}_{B/A} \)
Application: Used in analyzing moving vehicles, aircraft, and ships.
Summary Table: Key Equations and Concepts
Concept | Equation | Description |
|---|---|---|
Position Vector | Location in space | |
Average Velocity | Displacement per unit time | |
Instantaneous Velocity | Rate of change of position | |
Average Acceleration | Change in velocity per unit time | |
Instantaneous Acceleration | Rate of change of velocity | |
Projectile Motion | Horizontal and vertical motion equations | |
Uniform Circular Motion | Centripetal acceleration | |
Relative Velocity | Velocity in different frames |
Additional info: Academic context and expanded explanations were added to ensure completeness and clarity for exam preparation.
