 Back
BackOscillations and Simple Harmonic Motion: A Comprehensive Study Guide
Study Guide - Smart Notes
 Tailored notes based on your materials, expanded with key definitions, examples, and context.
Tailored notes based on your materials, expanded with key definitions, examples, and context.
Oscillations and Simple Harmonic Motion
Introduction to Oscillations
Oscillatory motion is a fundamental concept in physics, describing systems that move back and forth around an equilibrium position. Such motion is periodic, meaning each cycle takes the same amount of time. Oscillations are crucial in many engineering and physical systems, including vehicle suspensions, clocks, and even atomic structures.
Periodic Motion: Motion that repeats itself at regular intervals.
Examples: Mass-spring systems, pendulums, and electrical circuits.
Applications: Aerospace engineering, mechanical systems, and vibration analysis.

Oscillations of a Spring
Modeling Oscillatory Systems
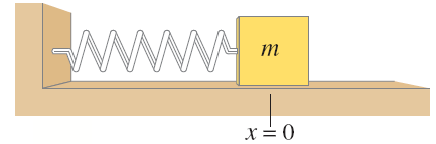
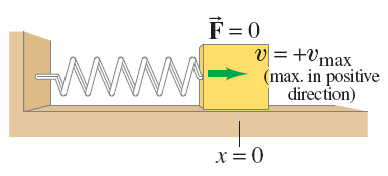
The mass-spring system is a classic model for studying oscillatory motion. It consists of a mass attached to a spring, which can move back and forth on a frictionless surface. The equilibrium position is where the spring is neither stretched nor compressed.
Assumptions: Frictionless surface, negligible spring mass.
Displacement (x): Measured from the equilibrium position.
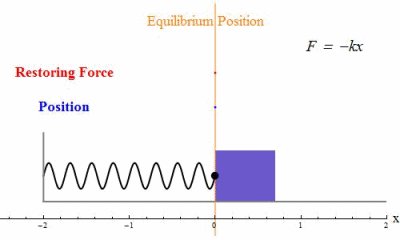
Hooke's Law
The restoring force exerted by a spring is proportional to the negative of the displacement from equilibrium. This is known as Hooke's Law:
Formula:
k: Spring constant (stiffness), measured in N/m.
Negative sign: Indicates the force is always directed toward equilibrium.
Elastic region: Valid only when the spring is not permanently deformed.
Key Definitions
Displacement (x): Distance from equilibrium, in meters (m).
Amplitude (A): Maximum displacement from equilibrium, in meters (m).
Cycle: One complete back-and-forth motion.
Period (T): Time to complete one cycle, in seconds (s).
Frequency (f): Number of cycles per second, in hertz (Hz).
Relationship:

Vertical Spring Systems
When a spring is oriented vertically, the equilibrium position shifts to where the spring force balances gravity:
Equilibrium condition:
Equilibrium displacement:

Simple Harmonic Motion (SHM)
Definition and Equation of Motion
Simple harmonic motion occurs when the restoring force is directly proportional to the negative of displacement. The motion is described by a second-order differential equation:
Differential equation:
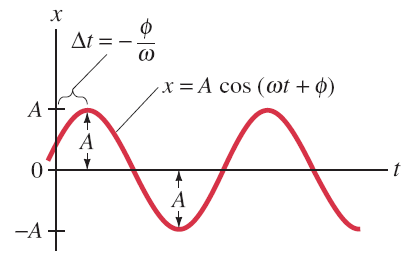
General solution:
Angular frequency:
Physical Meaning of Parameters
A: Amplitude (maximum displacement)
ω: Angular frequency (rad/s)
t: Time (s)
φ: Phase constant (initial phase at t = 0)
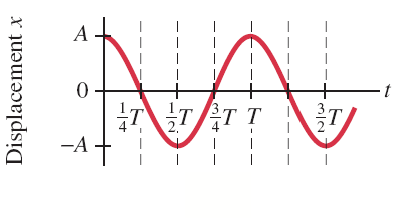
Frequency and Period
Angular frequency:
Frequency:
Period:
Note: Frequency and period do not depend on amplitude.

Kinematics of SHM
Displacement:
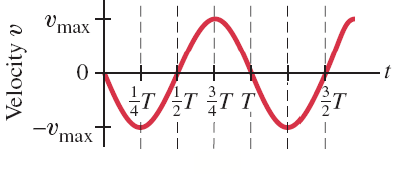
Velocity:
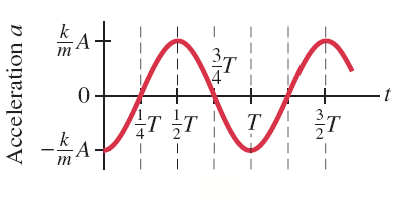
Acceleration:
Energy in the Simple Harmonic Oscillator
Potential and Kinetic Energy
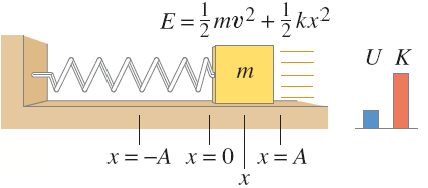
In a simple harmonic oscillator, energy oscillates between kinetic and potential forms, but the total mechanical energy remains constant (in the absence of friction).
Potential energy:
Kinetic energy:
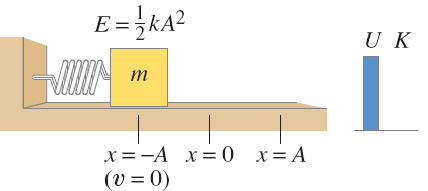
Total energy:
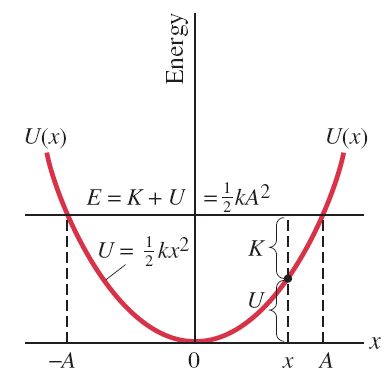
Energy Distribution
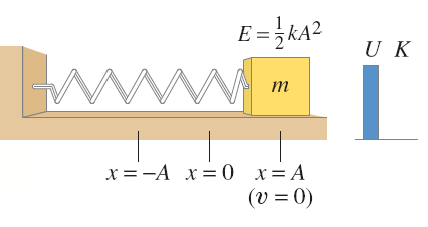
At maximum displacement (x = ±A): All energy is potential.
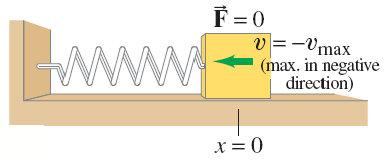
At equilibrium (x = 0): All energy is kinetic.
Elsewhere: Energy is shared between kinetic and potential forms.
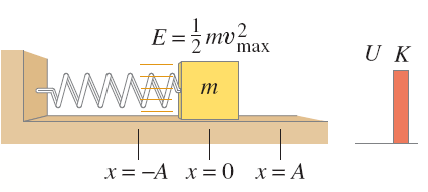
Maximum Velocity and Energy
Maximum velocity:
Total energy:
Simple Harmonic Motion and Uniform Circular Motion
Relationship Between SHM and Circular Motion
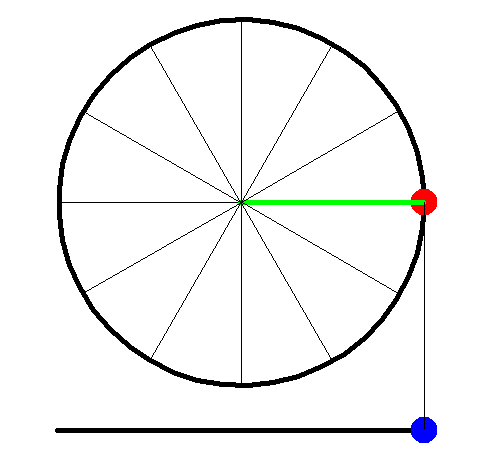
Simple harmonic motion can be visualized as the projection of uniform circular motion onto one axis. An object moving in a circle at constant speed, when projected onto a diameter, traces out SHM.
Projection: The x-component of the circular motion follows .
Application: This analogy helps in understanding phase and amplitude in SHM.
The Simple Pendulum
Definition and Parameters
A simple pendulum consists of a mass (bob) attached to a lightweight, inextensible cord. The motion is periodic and, for small angles, approximates SHM.
Parameters: Mass (m), length (L), angle (θ), gravitational acceleration (g).
Restoring force:
Small Angle Approximation
For small angles (), (in radians).
The motion then follows SHM:
Period: (independent of mass and amplitude for small angles)
The Physical and Torsion Pendulum
Physical Pendulum
A physical pendulum is any rigid body that oscillates about a pivot point. The period depends on the distribution of mass (moment of inertia) and the distance from the pivot to the center of gravity.
Equation of motion: (for small angles)
Period:
Torsion Pendulum
A torsion pendulum oscillates by twisting about its axis. The restoring torque is proportional to the angular displacement.
Restoring torque:
Angular frequency:
Damped Harmonic Motion
Introduction to Damping
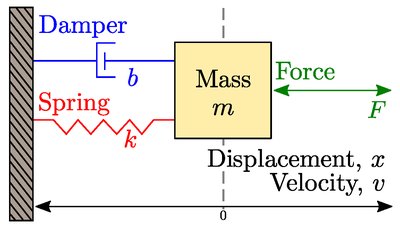
In real systems, friction or drag causes the amplitude of oscillations to decrease over time. This is called damped harmonic motion. The damping force is often proportional to velocity: .
Differential equation:
Damping constant (b): Measured in kg/s.
Types of Damping
Underdamped: (oscillatory decay)
Critically damped: (returns to equilibrium fastest without oscillating)
Overdamped: (slow return to equilibrium, no oscillation)
General solution (underdamped): , where and
Forced Oscillations and Resonance
Driven Oscillations
When an external periodic force acts on an oscillator, it is called a forced oscillation. If the driving frequency matches the system's natural frequency, resonance occurs, leading to large amplitude oscillations.
Equation of motion:
Resonance: Maximum amplitude occurs when driving frequency equals natural frequency.
Q-factor: , measures sharpness of resonance.
Summary Table: Types of Oscillatory Motion
System | Restoring Force | Equation of Motion | Period (T) |
|---|---|---|---|
Spring-Mass (Horizontal) | |||
Simple Pendulum (Small Angle) | |||
Physical Pendulum | |||
Torsion Pendulum |
Key Formulas
Hooke's Law:
SHM Solution:
Angular Frequency:
Period (Spring):
Period (Pendulum):
Total Energy:
Damped Oscillator:
Driven Oscillator:
Additional info: This guide covers the core concepts of oscillations, including mathematical modeling, energy analysis, and real-world applications. For more advanced topics, such as coupled oscillators, resonance in complex systems, and wave phenomena, refer to subsequent chapters.
