 Back
BackOscillations and Vibrations: Physics of Periodic Motion and Damping
Study Guide - Smart Notes
 Tailored notes based on your materials, expanded with key definitions, examples, and context.
Tailored notes based on your materials, expanded with key definitions, examples, and context.
Oscillations and Vibrations
Introduction to Oscillations
Oscillations, or vibrations, are repetitive deviations of a system from its reference state, typically the static equilibrium position. Oscillatory motion is fundamental in physics and engineering, describing phenomena from mechanical systems to biological processes.
Definition: An oscillation is a periodic motion about an equilibrium position.
Examples in Nature: Many organs in the human body naturally vibrate, such as the heart, lungs, and vocal cords.
Vibrations in the Human Body
The human body can experience both local and whole-body vibrations, which may occur naturally or due to external influences such as machinery or disease.
Local Vibrations: Affect specific body parts (e.g., hand-arm vibration from power tools).
Whole-Body Vibrations: Affect the entire body, often experienced by vehicle operators.
Medical Relevance: Vibrations can be symptoms of conditions like Parkinson’s disease or fever.


Vibrations in Industry and Engineering
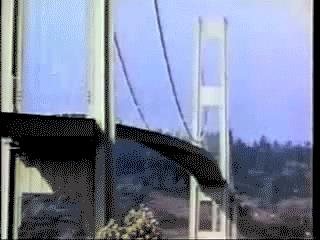
Vibrations are significant in industrial contexts, affecting machinery, structures, and product lifespans. Excessive vibration can lead to material fatigue and structural failure.
Machinery: Motors and conveyors exhibit vibrations that must be managed for safety and efficiency.
Structural Failures: Notable examples include the Tacoma Narrows Bridge collapse due to resonance.


Modeling Linear Vibrations
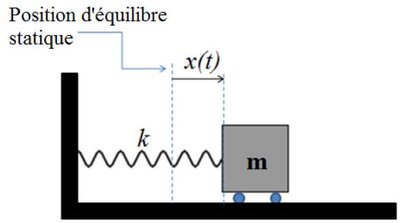
Mass-Spring-Damper System
The simplest model for mechanical vibrations is the mass-spring-damper system. It consists of a mass (m), a spring with stiffness (k), and a viscous damper (c).
Elastic Potential Energy:
Mechanical Energy:
Equation of Motion (Undamped)
The equation of motion for a free, undamped mass-spring system is:
Standard form: where is the natural angular frequency.
General solution:
Natural Frequency and Period
The natural frequency and period are intrinsic properties of the system:
Natural Frequency:
Period:
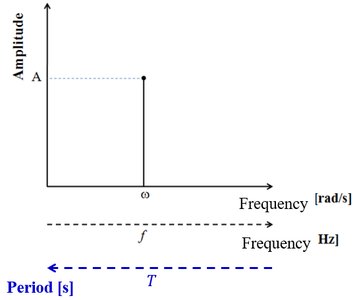
Time and Frequency Domain
Oscillatory motion can be analyzed in both the time and frequency domains. The amplitude spectrum shows the frequency content of the motion.
Periodicity of Combined Motions
When two or more harmonic motions are combined, the resulting motion may or may not be periodic, depending on the ratio of their frequencies.
If the ratio of frequencies is rational, the motion is periodic.
If the ratio is irrational, the motion is not periodic.
Simple Pendulum as an Oscillator
The simple pendulum is a classic example of a mechanical oscillator. For small angles, its equation of motion is linearized to match the standard form of simple harmonic motion.
Equation:
Natural frequency:

Equivalent Stiffness of Springs
Parallel and Series Combinations
Springs can be combined in parallel or series to achieve desired stiffness properties.
Parallel:
Series:
Example Calculation
To find the equivalent stiffness and natural frequency of a system with multiple springs, group parallel and series combinations stepwise, then use .
Damped Vibrations
Viscous Damping
Real systems lose energy due to damping, often modeled as a viscous force proportional to velocity: .
Damping Ratio:
Critical Damping:
Equation of Motion (Damped)
The equation for a damped oscillator is:
Standard form:
Damping Regimes
The behavior of the system depends on the damping ratio :
Regime | Condition | Behavior |
|---|---|---|
Underdamped | Oscillatory decay | |
Critically damped | No oscillation, fastest return to equilibrium | |
Overdamped | No oscillation, slow return to equilibrium |
Solution for Underdamped Case
Damped natural frequency:
Logarithmic Decrement and Damping Ratio
The logarithmic decrement quantifies the rate of decay of oscillations and is used to determine the damping ratio experimentally.
Example: Mass-Spring-Damper System
Given a system with N/m and measured damped period s, the following can be calculated:
Damped natural frequency: rad/s
Logarithmic decrement:
Damping ratio:
Undamped natural frequency: rad/s
Mass: kg
Damping coefficient: N·s/m
Critical damping coefficient: N·s/m
Experimental and Computational Methods
Least-Square Method
The least-square method is used to fit models to experimental data by minimizing the sum of squared errors. For vibration data, it can be used to estimate the damping ratio by fitting an exponential decay function to the amplitude envelope.
Best fit:
Identify
Measuring Vibrations with Images
Digital image analysis can be used to measure displacements and velocities in vibrating systems, using pixel-to-length calibration and tracking software.
Summary Table: Damping Regimes
Regime | Damping Ratio () | System Response |
|---|---|---|
Undamped | 0 | Pure oscillation |
Underdamped | 0 < < 1 | Oscillatory decay |
Critically damped | 1 | Fastest non-oscillatory return |
Overdamped | > 1 | Slow non-oscillatory return |
