 Back
BackOscillations: Simple Harmonic Motion, Energy, Damping, and Resonance
Study Guide - Smart Notes
 Tailored notes based on your materials, expanded with key definitions, examples, and context.
Tailored notes based on your materials, expanded with key definitions, examples, and context.
Oscillations and Simple Harmonic Motion (SHM)
Physical Model of a Mass-Spring System
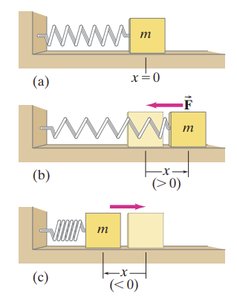
Oscillatory motion occurs when a system moves back and forth about an equilibrium position. The classic example is a block of mass m attached to a spring of stiffness constant k on a frictionless surface. The equilibrium position is where the spring is neither stretched nor compressed (x = 0).
Displacement (x): Signed distance from equilibrium.
Amplitude (A): Maximum displacement from equilibrium.
Restoring Force: Given by Hooke's Law:
Kinematics of SHM
In SHM, the displacement, velocity, and acceleration vary sinusoidally with time. The general solution for displacement is:
Velocity:
Acceleration:
Period:
Frequency:
Angular frequency:
The maxima and minima of these quantities are:
Maximum displacement:
Maximum speed:
Maximum acceleration:

Energy in SHM
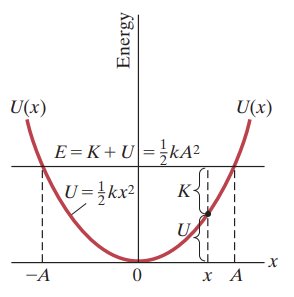
The total mechanical energy in a simple harmonic oscillator is conserved (if no damping):
Potential energy:
Kinetic energy:
Total energy:
At the turning points (), all energy is potential; at equilibrium (), all energy is kinetic.
Damped and Driven Oscillations
Damped Harmonic Motion
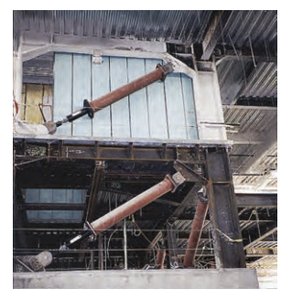
Real oscillators lose energy due to friction or resistance. The equation of motion for a damped oscillator is:
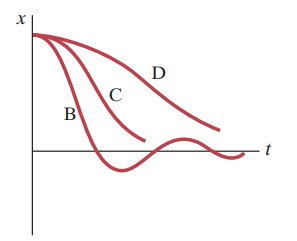
The solution depends on the damping constant b:
Underdamped: Oscillatory motion with exponentially decreasing amplitude.
Critically damped: Returns to equilibrium as quickly as possible without oscillating.
Overdamped: Returns to equilibrium without oscillating, more slowly than critical damping.
Forced Oscillations and Resonance
If an external periodic force acts on the system, the equation becomes:
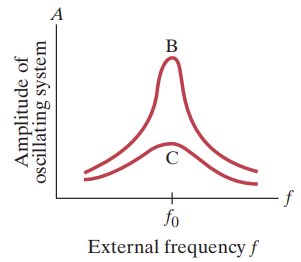
At steady state, the system oscillates at the driving frequency. The amplitude is largest when the driving frequency matches the system's natural frequency—this is resonance.
Resonant frequency (weak damping):
Quality factor: (sharpness of resonance)
Additional Topics
Physical Pendulum and Torque
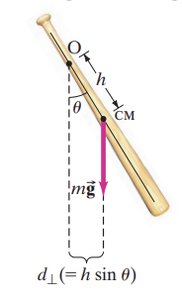
For a rigid body pivoted at a point O, the restoring torque due to gravity is , where is the perpendicular distance from the pivot to the center of mass. The motion can be analyzed similarly to SHM for small angles.
Summary Table: Types of Damped Motion
Case | Behavior |
|---|---|
Underdamped | Oscillates with decreasing amplitude |
Critically damped | Returns to equilibrium fastest without oscillating |
Overdamped | Returns to equilibrium without oscillating, slower than critical |
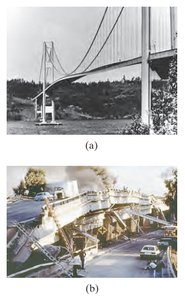
Additional info: The images included above directly illustrate the physical principles, mathematical relationships, and real-world consequences of oscillatory motion, damping, and resonance as discussed in the study notes.
