 Back
BackRotation of a Rigid Body: Kinematics, Dynamics, and Energy
Study Guide - Smart Notes
 Tailored notes based on your materials, expanded with key definitions, examples, and context.
Tailored notes based on your materials, expanded with key definitions, examples, and context.
Rigid Body Motion
Introduction to Rigid Bodies
A rigid body is an object whose size and shape do not change as it moves. Unlike the particle model, which treats objects as single points, the rigid body model considers the internal structure and distribution of mass. Rigid bodies are modeled as collections of particles held together by rigid, massless rods, such as atoms in a solid connected by chemical bonds.
Rigid bodies cannot be compressed, stretched, or deformed.
All points on a rigid body move with the same angular velocity and angular acceleration.
Types of motion: Translational, Rotational, and Combined.
Rotational Kinematics
Angular Variables and Sign Conventions
Rotational motion is described using angular displacement (\(\theta\)), angular velocity (\(\omega\)), and angular acceleration (\(\alpha\)). These variables are analogous to their linear counterparts but describe rotation about an axis.
Angular displacement (\(\theta\)): Measured counterclockwise (CCW) from the +x-axis.
Angular velocity (\(\omega\)): \(\omega = \frac{d\theta}{dt}\), unit: rad/s.
Angular acceleration (\(\alpha\)): \(\alpha = \frac{d^2\theta}{dt^2}\), unit: rad/s2.
Sign conventions: Positive \(\theta\) and \(\omega\) are CCW; negative values are CW.
Example: If a wheel is speeding up in the CCW direction, \(\alpha > 0\); if speeding up in the CW direction, \(\alpha < 0\).
Linear and Rotational Relationships
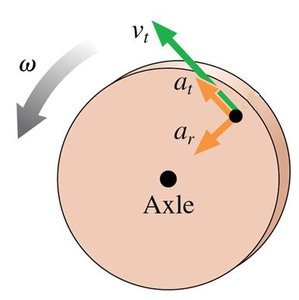
Each point on a rotating rigid body has both tangential and radial components of velocity and acceleration.
Tangential velocity: \(v_t = r\omega\)
Radial (centripetal) acceleration: \(a_r = r\omega^2\)
Tangential acceleration: \(a_t = r\alpha\)
Total velocity: \(\vec{v} = \vec{v}_t + \vec{v}_r\)
Total acceleration: \(\vec{a} = \vec{a}_t + \vec{a}_r\)
Kinematic Equations for Rotational Motion
For constant angular acceleration, the following equations apply (analogous to linear kinematics):
Note: These equations are valid only if \(\alpha\) is constant.
Center of Mass
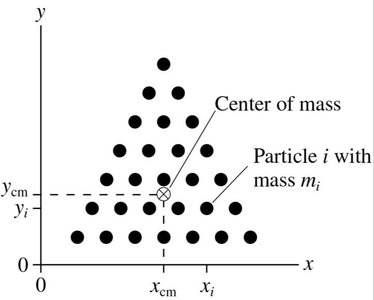
Definition and Calculation
The center of mass (CM) is the mass-weighted average position of all the particles in an object. For a system of particles:
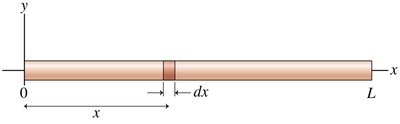
For a continuous object, the sums become integrals:
Example: Uniform Rod
For a uniform rod of length \(L\) and mass \(M\), the center of mass is at the midpoint, \(x_{CM} = \frac{L}{2}\).
Rotational Kinetic Energy and Moment of Inertia
Rotational Kinetic Energy
Each particle in a rotating object has kinetic energy due to its motion. The total rotational kinetic energy is:
where \(I\) is the moment of inertia about the axis of rotation.
Moment of Inertia
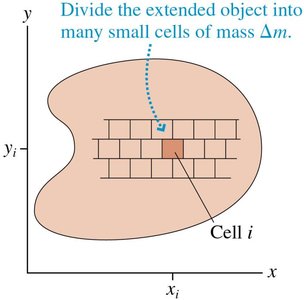
The moment of inertia quantifies how mass is distributed relative to the axis of rotation. For discrete particles:
For a continuous mass distribution:
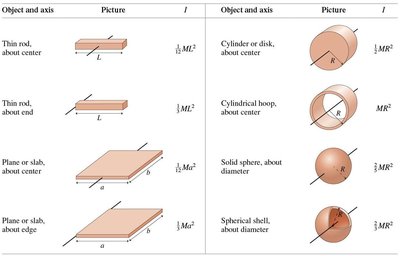
The moment of inertia depends on the object's shape, mass distribution, and the axis of rotation. Common moments of inertia are tabulated for standard shapes:
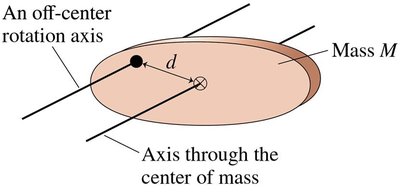
Parallel-Axis Theorem
If the axis of rotation is a distance \(d\) from the center of mass, the moment of inertia is:
Torque and Rotational Dynamics
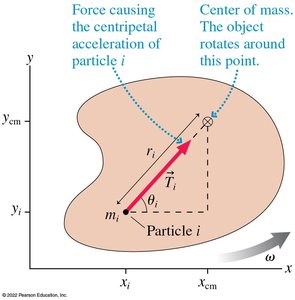
Definition of Torque
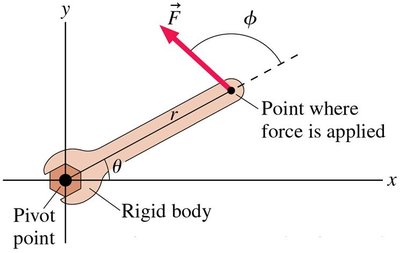
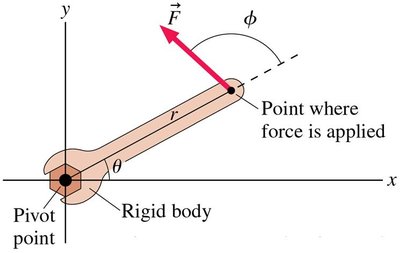
Torque (\(\tau\)) is the rotational equivalent of force. It measures the ability of a force to cause rotation about an axis:
Magnitude:
where \(\vec{r}\) is the position vector from the pivot to the point of force application, \(\vec{F}\) is the force, and \(\phi\) is the angle between them.
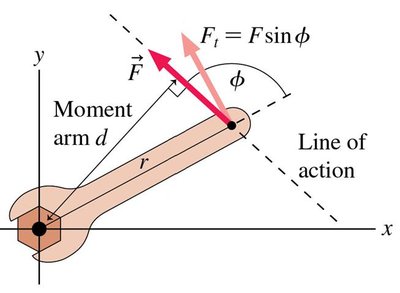
Lever Arm and Moment Arm
The lever arm (or moment arm) is the perpendicular distance from the axis of rotation to the line of action of the force:
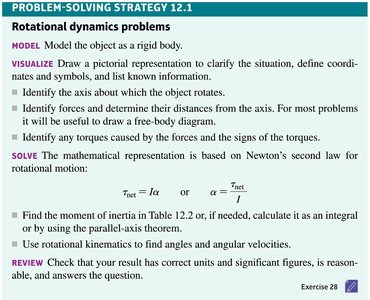
Newton's Second Law for Rotation
The rotational analog of Newton's Second Law relates net torque to angular acceleration:
Constraints and Equilibrium
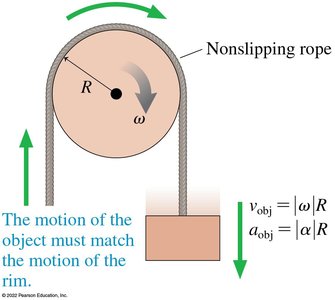
Ropes, Pulleys, and Constraints
When a rope passes over a pulley with no slipping, the velocity and acceleration of the rope match those of the rim of the pulley:
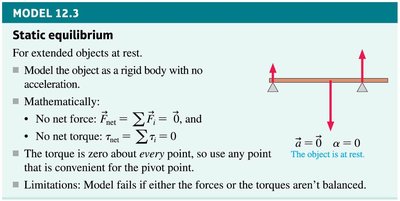
Static Equilibrium
An object is in static equilibrium if it has no net force and no net torque:
Rolling Motion
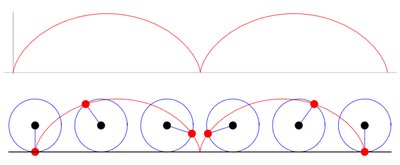
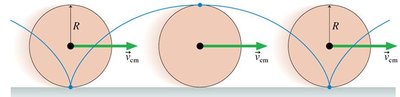
Rolling Without Slipping
When an object rolls without slipping, its center of mass moves a distance equal to the circumference in one revolution:
Kinetic Energy of Rolling Objects
The total kinetic energy of a rolling object is the sum of translational and rotational kinetic energies:
Vectors in Rotational Motion
Angular Velocity and the Right-Hand Rule
The direction of angular velocity (\(\omega\)) is given by the right-hand rule: curl your fingers in the direction of rotation, and your thumb points along the axis of rotation.

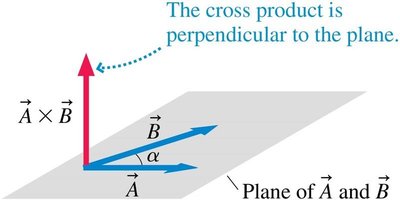
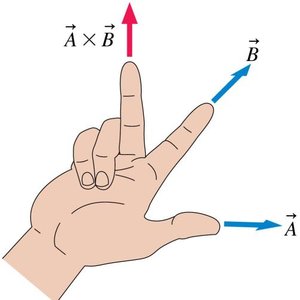
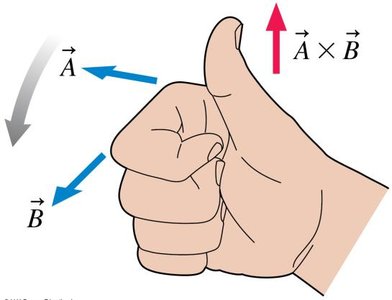
Cross Product and Torque Direction
The cross product of two vectors yields a vector perpendicular to the plane containing them. The direction is determined by the right-hand rule.
Angular Momentum
Definition and Conservation
Angular momentum (\(L\)) for a particle is defined as:
For a rigid body rotating about a fixed axis:
Conservation of Angular Momentum: If the net external torque on a system is zero, angular momentum is conserved:
Appendix: Derivations
Center of Mass (Derivation)
By considering the forces on each particle and applying Newton's Second Law, the center of mass expressions are derived as:
Parallel-Axis Theorem (Derivation)
For an axis a distance \(d\) from the center of mass:
Moment of Inertia (Integral Form)
For a continuous mass distribution:
The coordinate system should be chosen with the origin at the axis of rotation.
Additional info: This guide covers the core concepts of rigid body rotation, including kinematics, energy, torque, equilibrium, rolling motion, and angular momentum, with relevant equations and diagrams for college-level physics.
