 Back
BackRotational Dynamics and Moment of Inertia: Study Notes
Study Guide - Smart Notes
 Tailored notes based on your materials, expanded with key definitions, examples, and context.
Tailored notes based on your materials, expanded with key definitions, examples, and context.
Rotational Dynamics and Moment of Inertia
Introduction to Rotational Motion
Rotational motion extends the concepts of linear motion to objects that rotate about an axis. In this unit, we explore how forces cause rotational acceleration, how energy is stored in rotating objects, and how the distribution of mass affects rotational behavior.
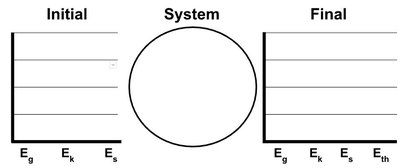
Energy in Rotational Motion
Linear vs. Rotational Kinetic Energy
Linear Kinetic Energy (Ek, linear): The energy due to the motion of the center of mass of an object, given by .
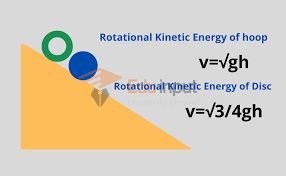
Rotational Kinetic Energy (Ek, rotational): The energy due to the rotation of an object about an axis, given by .
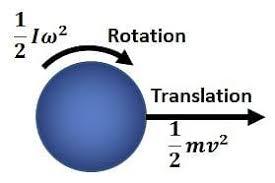
Total Kinetic Energy: For rolling objects, both forms must be considered: .
Example: A rolling sphere has both translational and rotational kinetic energy.
Moment of Inertia
Definition and Physical Meaning
Moment of Inertia (I): The rotational analog of mass; it quantifies how mass is distributed relative to the axis of rotation and determines how much torque is needed for a given angular acceleration.
Units:
Key Point: The farther the mass is from the axis, the greater the moment of inertia.
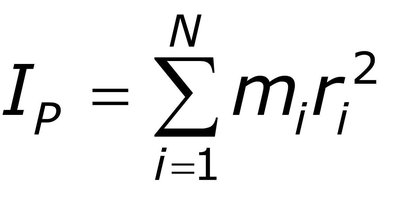
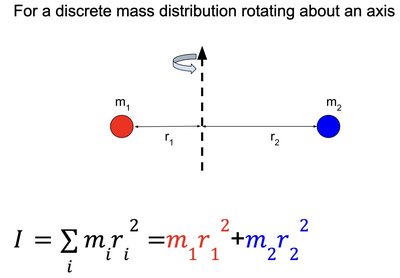
Formula for Discrete Masses:
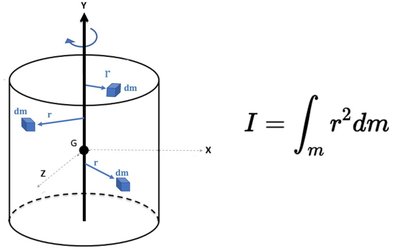
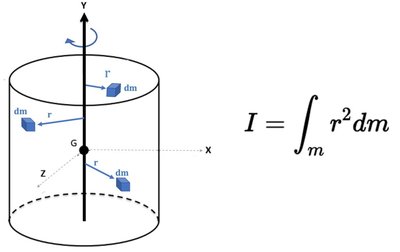
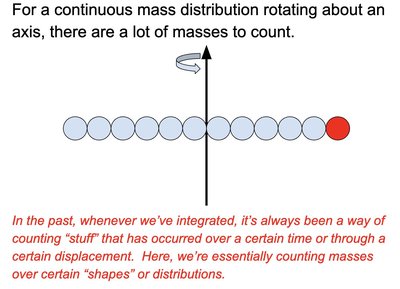
Formula for Continuous Mass Distributions:
Example: A solid cylinder, hoop, and sphere all have different moments of inertia even if their mass and radius are the same.
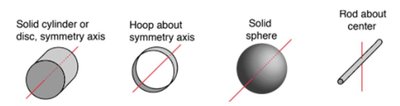
Common Moments of Inertia for Standard Shapes
Solid Cylinder or Disk (axis through center):
Hoop (axis through symmetry axis):
Solid Sphere (axis through center):
Thin Rod (axis through center):
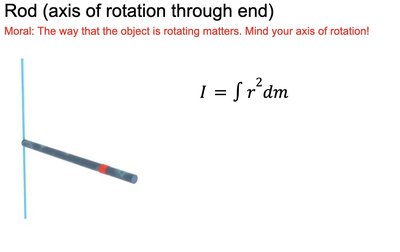
Thin Rod (axis through end):
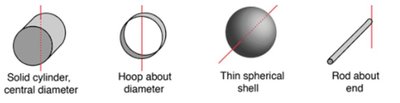
Dependence on Mass Distribution and Axis of Rotation
Key Point: The same object can have different moments of inertia depending on the axis about which it rotates.
Example: A hoop about its symmetry axis vs. about its diameter.
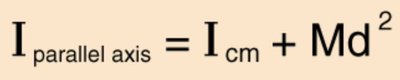
Parallel Axis Theorem
The parallel axis theorem allows calculation of the moment of inertia about any axis parallel to one through the center of mass:
Formula:
Where: is the moment of inertia through the center of mass, is the total mass, and is the distance between axes.
Conditions: The axes must be parallel, and the known axis must go through the center of mass.
Torque and Rotational Dynamics
Definition of Torque
Torque (τ): The rotational analog of force; it causes angular acceleration.
Formula:
Net Torque and Angular Acceleration:
Right-Hand Rule: Used to determine the direction of torque vectors.
Lab Example: Net Torque and Angular Acceleration
Purpose: To graphically and mathematically model the relationship between net torque and angular acceleration for a rotating system.
Key Finding: The slope of the net torque vs. angular acceleration graph gives the moment of inertia ().

Rolling Motion and Energy Conservation
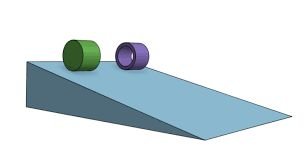
Rolling Objects Down an Incline
Observation: Objects with the same mass but different mass distributions roll down a ramp at different rates due to differences in moment of inertia.
Key Point: More mass farther from the axis (higher ) means slower acceleration down the ramp.
Example: A hoop and a solid disk of equal mass and radius will reach the bottom at different times.

Calculating Moment of Inertia
Discrete vs. Continuous Mass Distributions
Discrete: (sum over all point masses)
Continuous: (integral over the mass distribution)
Mass Element (dm): For continuous objects, is expressed in terms of mass density and geometry.
Uniform vs. Non-Uniform Mass Distributions
Uniform: Mass per unit length/area/volume is constant.
Non-Uniform: Mass density varies with position; becomes a function of position.
Example: For a rod with , .
Rolling With and Without Slipping
Friction and Rolling Motion
Rolling with Slipping: Kinetic friction acts; .
Rolling without Slipping: Static friction acts; (condition for smooth rolling).
Key Point: The transition from slipping to rolling without slipping is governed by frictional torque and force.
Angular Momentum
Definition and Conservation
Angular Momentum (L): For a rotating object, .
Conservation: In the absence of external torques, angular momentum is conserved.
Impulse-Momentum Theorem (Rotational):
Summary Table: Moments of Inertia for Common Shapes
Shape | Axis | Moment of Inertia (I) |
|---|---|---|
Solid Cylinder/Disk | Symmetry axis | |
Hoop | Symmetry axis | |
Solid Sphere | Center | |
Thin Rod | Center | |
Thin Rod | End |
Key Equations
(discrete)
(continuous)
(rolling without slipping)
Practice Problems and Applications
Analyze rolling objects on inclines, considering both energy and torque.
Apply the parallel axis theorem to find moments of inertia about different axes.
Set up and solve problems involving non-uniform mass distributions using integration.
Use conservation of angular momentum in collision and rotational impulse scenarios.
Additional info: These notes synthesize the main concepts, equations, and applications from the provided materials, focusing on rotational dynamics, moment of inertia, and their role in energy and motion analysis for rotating systems.
