Back
BackRotational Kinematics and Torque: Study Notes
Study Guide - Smart Notes
 Tailored notes based on your materials, expanded with key definitions, examples, and context.
Tailored notes based on your materials, expanded with key definitions, examples, and context.
Rotational Kinematics
Introduction to Rotational Motion
Rotational motion describes the movement of objects that spin around an axis. Unlike linear motion, where objects move along a straight path, rotational motion involves objects turning about a fixed point or axis. Examples include spinning wheels, rotating doors, and the motion of planets.

Rigid Bodies and Rotational Motion
A rigid body is an extended object whose size and shape do not change as it moves. In physics, we often model objects as rigid bodies to simplify the analysis of their rotational motion. The internal structure of a rigid body remains constant, and all points in the body move in circles about the axis of rotation.

Uniform Circular Motion
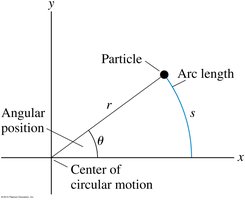
Uniform circular motion occurs when an object moves around a center at a constant distance (radius) and with a constant speed. The position of a particle in circular motion can be described by its angular position, radius, and arc length.
Angular position (θ): The angle between a reference direction and the line from the center to the particle.
Arc length (s): The distance traveled along the circular path.
Radius (r): The constant distance from the center to the particle.
Angular Acceleration
Angular acceleration (α) measures how rapidly the angular velocity (ω) is changing with time. It is defined as the rate of change of angular velocity:
Positive angular acceleration means the object is speeding up in the counterclockwise direction or slowing down in the clockwise direction.
Negative angular acceleration means the object is slowing down in the counterclockwise direction or speeding up in the clockwise direction.


Uniform and Nonuniform Circular Motion
In uniform circular motion, the speed is constant, and the acceleration is directed toward the center (centripetal acceleration). In nonuniform circular motion, there is also a tangential acceleration component due to changing speed.
Centripetal acceleration (ac):
Tangential acceleration (at):

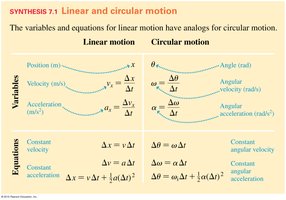
Linear and Circular Motion: Analogies
Many equations for linear motion have direct analogs in circular motion. The table below summarizes these relationships:
Linear Motion | Circular Motion |
|---|---|
Position (x) | Angle (θ, in radians) |
Velocity (v) | Angular velocity (ω) |
Acceleration (a) | Angular acceleration (α) |
Torque and Rotational Dynamics
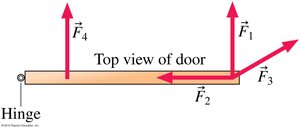
Definition of Torque
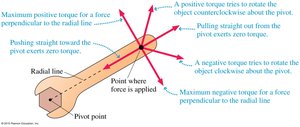
Torque (τ) is a measure of the ability of a force to cause an object to rotate about an axis. The magnitude of the torque depends on three factors:
The magnitude of the force (F)
The distance (r) from the pivot (axis of rotation) to the point where the force is applied
The angle (θ) at which the force is applied
The mathematical expression for torque is:
Torque: Direction and Sign Convention
Torque is considered positive if it tends to rotate the object in a counterclockwise direction and negative if it tends to rotate the object clockwise. The direction of the applied force relative to the pivot determines the sign and effectiveness of the torque.
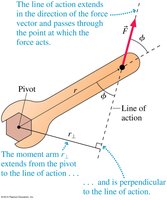
Moment Arm and Line of Action
The moment arm (or lever arm) is the perpendicular distance from the axis of rotation (pivot) to the line of action of the force. The torque is maximized when the force is applied perpendicular to the moment arm.
Gravitational Torque and Center of Gravity
Gravitational Torque
Gravity exerts a force on every particle of an object, and the sum of these forces can produce a torque about a rotation axis. The center of gravity is the point where the total gravitational torque on the object is zero.


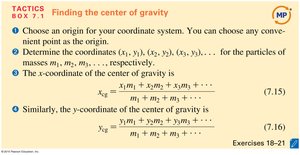
Calculating the Center of Gravity
To find the center of gravity for a system of particles, use the following formulas:
Choose an origin for your coordinate system.
For particles with masses at positions :
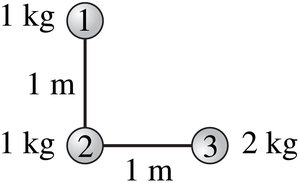
Example: Center of Gravity Calculation
Consider an object made of three balls connected by massless rods. The masses and positions are shown below. To find the x- and y-positions of the center of gravity, apply the formulas above using the given masses and coordinates.