 Back
BackRotational Motion and Torque: Study Notes
Study Guide - Smart Notes
 Tailored notes based on your materials, expanded with key definitions, examples, and context.
Tailored notes based on your materials, expanded with key definitions, examples, and context.
Rotational Motion
Angular Velocity and Speed
Rotational motion describes the movement of objects around a fixed axis. The angular velocity (\( \omega \)) is a measure of how quickly an object rotates, typically in radians per second (rad/s).
Conversion from rpm to rad/s: \( \omega = \text{rpm} \times \frac{2\pi}{60} \)
Linear velocity at a radius r: \( v = \omega r \)
Example: For a disk spinning at 7200 rpm, \( \omega = 7200 \times \frac{2\pi}{60} = 754 \text{ rad/s} \). At a radius of 0.03 m, \( v = 754 \times 0.03 = 22.6 \text{ m/s} \).
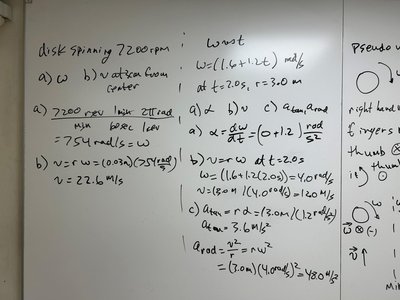
Constant Angular Acceleration
When an object rotates with a constant angular acceleration (\( \alpha \)), its angular velocity changes linearly over time. The angular displacement (\( \theta \)) can be found using kinematic equations analogous to linear motion.
Angular acceleration: \( \alpha = \frac{\Delta \omega}{\Delta t} \)
Angular displacement: \( \theta = \omega_0 t + \frac{1}{2} \alpha t^2 \)
Example: If a rotor accelerates from 0 to 20,000 rpm in 30 s, \( \alpha = \frac{20,000 \times 2\pi/60}{30} = 70 \text{ rad/s}^2 \).
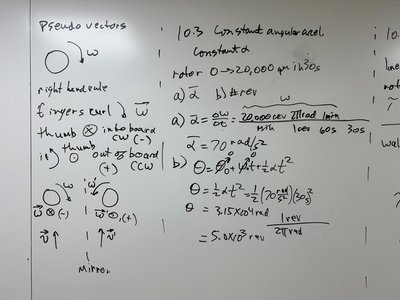
Pseudovectors and the Right-Hand Rule
Direction of Angular Quantities
Angular velocity and angular acceleration are pseudovectors, meaning their direction is determined by the right-hand rule. This is essential for understanding the orientation of rotational motion.
Right-hand rule: Curl the fingers of your right hand in the direction of rotation; your thumb points in the direction of the angular velocity vector (\( \vec{\omega} \)).
Clockwise (CW): Vector points into the board.
Counterclockwise (CCW): Vector points out of the board.
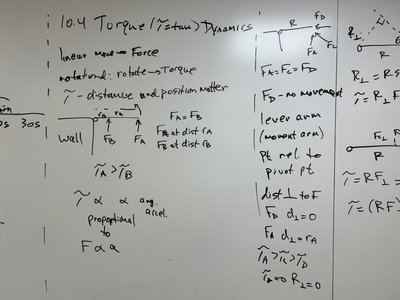
Torque and Rotational Dynamics
Definition of Torque
Torque (\( \tau \)) is the rotational equivalent of force. It measures the tendency of a force to rotate an object about an axis.
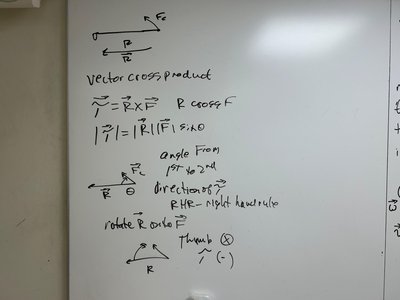
Formula: \( \vec{\tau} = \vec{r} \times \vec{F} \)
Magnitude: \( |\tau| = r F \sin \theta \), where \( \theta \) is the angle between \( \vec{r} \) and \( \vec{F} \).
Units: Newton-meters (N·m)
Direction: Determined by the right-hand rule for cross products.
Lever Arm and Moment Arm
The lever arm (or moment arm) is the perpendicular distance from the axis of rotation to the line of action of the force. The effectiveness of a force in producing rotation depends on this distance.
Torque with lever arm: \( \tau = r_{\perp} F \)
Example: If a force is applied at a distance but not perpendicular, only the perpendicular component contributes to torque.
Rotational Equilibrium
An object is in rotational equilibrium if the net torque acting on it is zero. This is analogous to translational equilibrium where the net force is zero.
Condition: \( \sum \tau = 0 \)
Application: Used to analyze static structures and balance problems.
Linear and Rotational Kinematic Connections
Analogies Between Linear and Rotational Motion
There are direct analogies between linear and rotational motion. Understanding these helps in solving problems involving both types of motion.
Linear | Rotational |
|---|---|
Displacement (x) | Angle (\( \theta \)) |
Velocity (v) | Angular velocity (\( \omega \)) |
Acceleration (a) | Angular acceleration (\( \alpha \)) |
Force (F) | Torque (\( \tau \)) |
Mass (m) | Moment of inertia (I) |
Key equations:
\( v = r \omega \)
\( a = r \alpha \)
\( x = x_0 + v_0 t + \frac{1}{2} a t^2 \)
\( \theta = \theta_0 + \omega_0 t + \frac{1}{2} \alpha t^2 \)
\( F = ma \)
\( \tau = I \alpha \)
Vector Cross Product in Torque
The torque vector is calculated using the vector cross product, which gives both magnitude and direction.
Cross product: \( \vec{\tau} = \vec{r} \times \vec{F} \)
Magnitude: \( |\tau| = r F \sin \theta \)
Direction: Perpendicular to the plane formed by \( \vec{r} \) and \( \vec{F} \), following the right-hand rule.
Summary Table: Key Rotational Motion Equations
Quantity | Symbol | Equation |
|---|---|---|
Angular velocity | \( \omega \) | \( \omega = \omega_0 + \alpha t \) |
Angular displacement | \( \theta \) | \( \theta = \omega_0 t + \frac{1}{2} \alpha t^2 \) |
Torque | \( \tau \) | \( \tau = r F \sin \theta \) |
Moment of inertia | \( I \) | Depends on mass distribution |
Rotational analog of Newton's 2nd law | \( \tau = I \alpha \) | \( \tau = I \alpha \) |
Additional info: These notes cover the core concepts of rotational motion, torque, and their mathematical treatment, as found in a typical college physics course (Ch. 10-11).
