 Back
BackRotational Motion: Concepts, Equations, and Applications
Study Guide - Smart Notes
 Tailored notes based on your materials, expanded with key definitions, examples, and context.
Tailored notes based on your materials, expanded with key definitions, examples, and context.
Rotational Motion
Introduction to Rotational Motion
Rotational motion describes the movement of objects around a fixed axis. It is a fundamental concept in physics, especially in the study of rigid bodies. Key quantities include angular position, angular velocity, and angular acceleration, which are analogous to their linear counterparts.
Angular Position (\(\theta\)): The orientation of a line with another reference line, measured in radians.
Angular Displacement (\(\Delta \theta\)): The change in angular position.
Angular Velocity (\(\omega\)): The rate of change of angular position, \(\omega = \frac{\Delta \theta}{\Delta t}\), measured in rad/s.
Angular Acceleration (\(\alpha\)): The rate of change of angular velocity, \(\alpha = \frac{\Delta \omega}{\Delta t}\), measured in rad/s2.
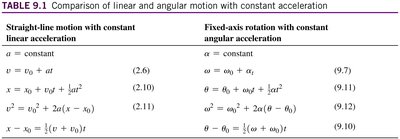
Equations of Rotational Motion with Constant Angular Acceleration
These equations are analogous to those for linear motion with constant acceleration. They are essential for solving problems involving rotating bodies.
Straight-line motion with constant linear acceleration | Fixed-axis rotation with constant angular acceleration |
|---|---|
\(a = \text{constant}\) | \(\alpha = \text{constant}\) |
\(v = v_0 + at\) | \(\omega = \omega_0 + \alpha t\) |
\(x = x_0 + v_0 t + \frac{1}{2} a t^2\) | \(\theta = \theta_0 + \omega_0 t + \frac{1}{2} \alpha t^2\) |
\(v^2 = v_0^2 + 2a(x - x_0)\) | \(\omega^2 = \omega_0^2 + 2\alpha (\theta - \theta_0)\) |
\(x - x_0 = \frac{1}{2}(v_0 + v)t\) | \(\theta - \theta_0 = \frac{1}{2}(\omega_0 + \omega)t\) |
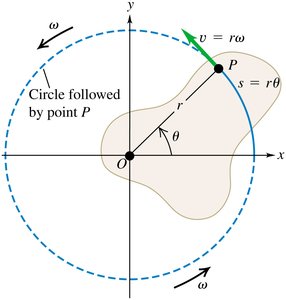
Linear vs. Angular Quantities
There is a direct relationship between linear and angular quantities for a point at a distance \(r\) from the axis of rotation:
Linear velocity: \(v = r\omega\)
Linear acceleration: \(a = r\alpha\)
Arc length: \(s = r\theta\)
Moment of Inertia
The moment of inertia (\(I\)) quantifies how mass is distributed relative to the axis of rotation. It plays a similar role in rotational motion as mass does in linear motion. The moment of inertia depends on both the mass and the geometry of the object, as well as the axis about which it rotates.
Definition: \(I = \sum m_i r_i^2\) for discrete masses, or \(I = \int r^2 dm\) for continuous bodies.
Units: kg·m2
Must specify the axis of rotation!
Kinetic Energy of Rotation
The kinetic energy of a rotating rigid body is given by:
\(K = \frac{1}{2} I \omega^2\)
This formula is analogous to the kinetic energy of a particle in linear motion, \(K = \frac{1}{2} m v^2\).
Work-Energy Theorem for Rotation
The work-energy theorem can be extended to rotational motion. The net work done by torques acting on a rotating body equals the change in its rotational kinetic energy.
\(W_{\text{net}} = \Delta K = \frac{1}{2} I \omega^2 - \frac{1}{2} I \omega_0^2\)
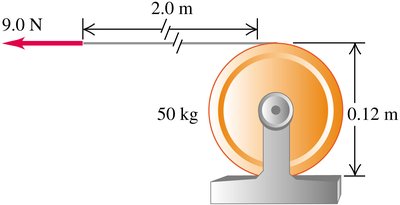
Example: A winch drum (solid cylinder, mass 50 kg, diameter 0.12 m) is rotated by a cable pulled with a force of 9.0 N over 2.0 m. Find the final angular velocity and the speed of the cable.
Rotation About a Moving Axis
In general, the axis of rotation may not be fixed. The motion of a rigid body can be described as a combination of translation of the center of mass and rotation about an axis through the center of mass.
Total kinetic energy: \(K_{\text{total}} = \frac{1}{2} M v_{\text{CM}}^2 + \frac{1}{2} I_{\text{CM}} \omega^2\)
Where \(v_{\text{CM}}\) is the velocity of the center of mass and \(I_{\text{CM}}\) is the moment of inertia about the center of mass.
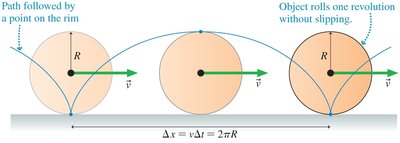
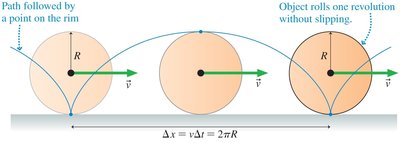
Rolling Motion Without Slipping
When an object rolls without slipping, there is a special relationship between its translational and rotational motion:
\(v_{\text{CM}} = \omega R\)
For one revolution: \(\Delta x = 2\pi R\)
Energy in Rolling Motion
The total kinetic energy of a rolling object is the sum of its translational and rotational kinetic energies:
\(K_{\text{total}} = \frac{1}{2} M v_{\text{CM}}^2 + \frac{1}{2} I_{\text{CM}} \omega^2\)
For rolling without slipping: \(v_{\text{CM}} = \omega R\)
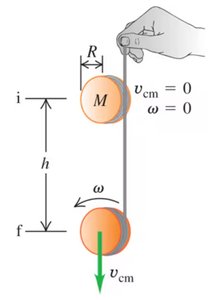
Example: Yo-Yo Dropping Down
A yo-yo (solid disk, mass \(M\), radius \(R\)) is released from rest and unwinds as it falls. The speed of the center of mass after dropping a distance \(h\) can be found using energy conservation:
Potential energy lost = total kinetic energy gained
\(Mgh = \frac{1}{2} M v_{\text{CM}}^2 + \frac{1}{2} I \omega^2\)
For a solid disk: \(I = \frac{1}{2} M R^2\), \(v_{\text{CM}} = \omega R\)
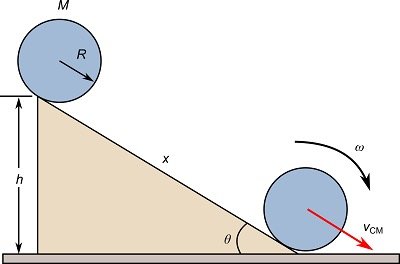
Objects Rolling Down an Inclined Plane
When different objects roll down an incline, their moments of inertia affect their acceleration and final speed. For objects of the same mass and radius, the one with the smallest moment of inertia reaches the bottom first.
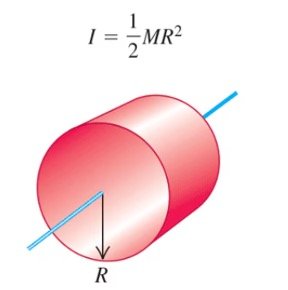
Solid cylinder: \(I = \frac{1}{2} M R^2\)
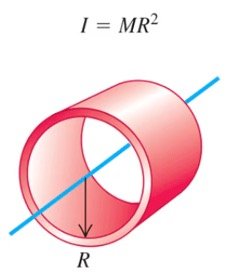
Hollow cylinder: \(I = M R^2\)
Solid cylinders reach the bottom before hollow cylinders due to lower rotational inertia.
Quick Check: Rolling Objects
Two cylinders (one solid, one hollow) of equal mass and diameter are released from rest at the top of an incline. The solid cylinder reaches the bottom first because it has a smaller moment of inertia, so more of its potential energy is converted into translational kinetic energy.
Object | Moment of Inertia (I) | Speed at Bottom |
|---|---|---|
Solid Cylinder | \(\frac{1}{2} M R^2\) | Faster |
Hollow Cylinder | \(M R^2\) | Slower |
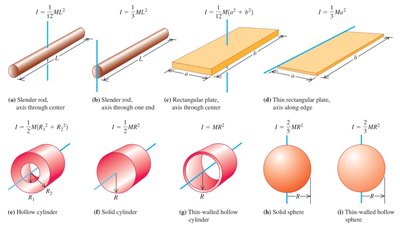
Summary Table: Moments of Inertia for Common Shapes
Shape | Moment of Inertia (I) |
|---|---|
Slender rod, axis through center | \(\frac{1}{12} M L^2\) |
Slender rod, axis through end | \(\frac{1}{3} M L^2\) |
Solid cylinder | \(\frac{1}{2} M R^2\) |
Hollow cylinder | \(M R^2\) |
Solid sphere | \(\frac{2}{5} M R^2\) |
Thin-walled hollow sphere | \(\frac{2}{3} M R^2\) |
Additional info: The above notes expand on the provided slides and images, filling in standard definitions, equations, and context for a comprehensive mini-textbook summary on rotational motion, suitable for college-level physics students.
