 Back
BackRotational Motion: Concepts, Equations, and Applications
Study Guide - Smart Notes
 Tailored notes based on your materials, expanded with key definitions, examples, and context.
Tailored notes based on your materials, expanded with key definitions, examples, and context.
Rotational Motion
Introduction to Rotational Motion
Rotational motion describes the movement of objects around a fixed axis. This topic is fundamental in physics, as it extends the concepts of linear motion to systems that rotate, such as wheels, gears, and planets.
Angular Position (\( \theta \)): The angle an object has rotated, measured in radians.
Angular Displacement (\( \Delta \theta \)): The change in angular position.
Angular Velocity (\( \omega \)): The rate of change of angular position, measured in radians per second (rad/s).
Angular Acceleration (\( \alpha \)): The rate of change of angular velocity, measured in radians per second squared (rad/s2).
Equations of Rotational Motion with Constant Angular Acceleration
These equations are analogous to those for linear motion with constant acceleration:
\( \omega = \omega_0 + \alpha t \)
\( \theta = \theta_0 + \omega_0 t + \frac{1}{2} \alpha t^2 \)
\( \omega^2 = \omega_0^2 + 2\alpha (\theta - \theta_0) \)
\( \theta - \theta_0 = \frac{1}{2}(\omega_0 + \omega)t \)
Example: If a wheel starts from rest and accelerates at a constant rate, these equations can be used to find its angular velocity, displacement, or time taken for a certain rotation.
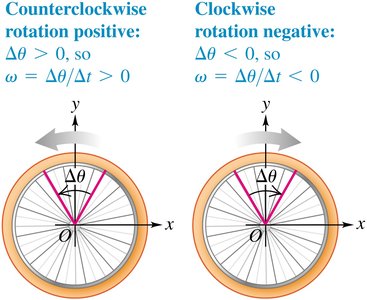
Sign Convention for Angular Quantities
The direction of rotation determines the sign of angular quantities:
Counterclockwise rotation: Positive angular displacement and velocity (\( \Delta \theta > 0, \omega > 0 \)).
Clockwise rotation: Negative angular displacement and velocity (\( \Delta \theta < 0, \omega < 0 \)).
Period of Rotational Motion
The period (\( T \)) is the time required for one complete revolution. For constant angular velocity:
\( \Delta \theta_{\text{rev}} = 2\pi \) radians for one revolution
\( T = \frac{2\pi}{\omega} \)
\( \omega = \frac{2\pi}{T} \)
Linear and Angular Velocity
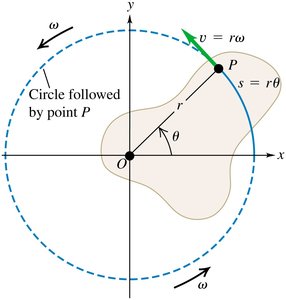
Relationship Between Linear and Angular Velocity
For a point at a distance \( r \) from the axis of rotation, the linear (tangential) velocity \( v \) is related to the angular velocity \( \omega \) by:
\( v = r\omega \)
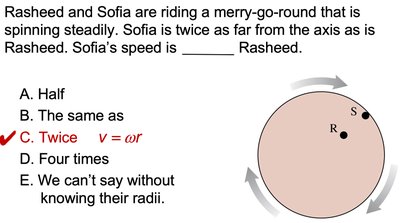
Example: On a merry-go-round, a person twice as far from the center as another will have twice the linear speed if both have the same angular velocity.
Linear and Angular Acceleration
Relationship Between Linear and Angular Acceleration
If the angular velocity changes, the linear (tangential) acceleration \( a_{\text{tan}} \) is:
\( a_{\text{tan}} = r\alpha \)
There is also a radial (centripetal) acceleration \( a_{\text{rad}} \) due to the change in direction of velocity:
\( a_{\text{rad}} = \frac{v^2}{r} = r\omega^2 \)
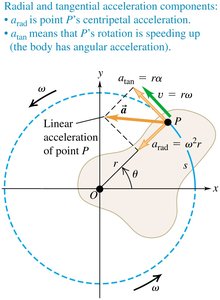
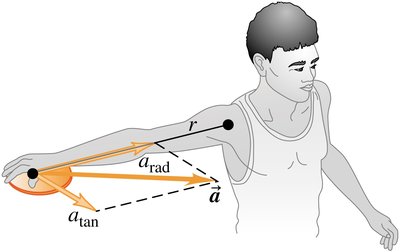
The total acceleration is the vector sum of tangential and radial components:
\( a = \sqrt{a_{\text{tan}}^2 + a_{\text{rad}}^2} \)
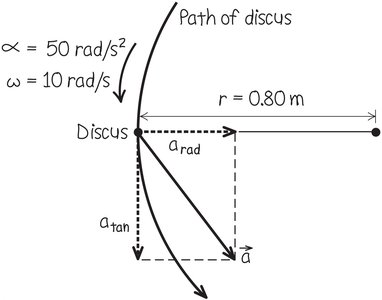
Example: A discus thrower with \( \alpha = 50 \) rad/s2, \( \omega = 10 \) rad/s, and \( r = 0.80 \) m has:
\( a_{\text{tan}} = r\alpha = 0.80 \times 50 = 40 \) m/s2
\( a_{\text{rad}} = r\omega^2 = 0.80 \times 100 = 80 \) m/s2
\( a = \sqrt{40^2 + 80^2} = 89.4 \) m/s2
Applications of Rotational Motion
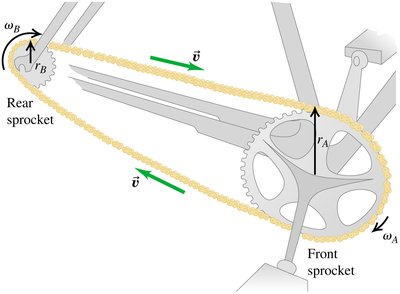
Bicycle Gears
When two sprockets are connected by a chain, their angular speeds are related by the radii (or number of teeth):
\( \omega_A r_A = \omega_B r_B \)
\( \frac{\omega_A}{\omega_B} = \frac{r_B}{r_A} = \frac{N_B}{N_A} \) (where \( N \) is the number of teeth)
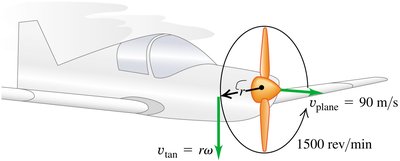
Designing a Propeller
To ensure the tip speed of a propeller does not exceed a certain value, use:
\( v_{\text{tip}} = r_{\text{max}} \omega \)
\( r_{\text{max}} = \frac{v_{\text{tip}}}{\omega} \)
Kinetic Energy of Rotation
Rotational Kinetic Energy
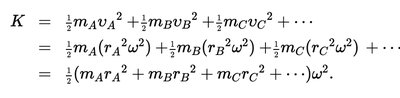
A rotating rigid body has kinetic energy due to the motion of its mass elements:
\( K = \frac{1}{2} I \omega^2 \)
Where \( I \) is the moment of inertia and \( \omega \) is the angular velocity.
Moment of Inertia
Definition and Calculation
The moment of inertia (\( I \)) quantifies how mass is distributed relative to the axis of rotation. It depends on both the mass and its distance from the axis:
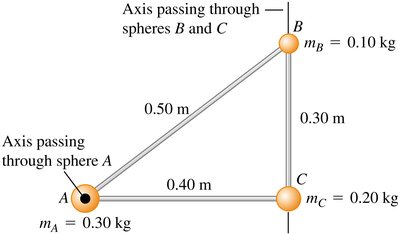
\( I = \sum m_i r_i^2 \) for discrete masses
\( I = \int r^2 dm \) for continuous bodies
Example: For a system of three masses connected by rods, calculate \( I \) about different axes using the above formulas.
Moments of Inertia for Common Shapes
Different shapes have characteristic moments of inertia, depending on their geometry and axis of rotation:
Shape | Moment of Inertia (I) |
|---|---|
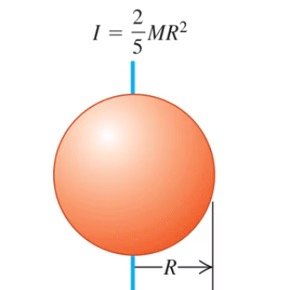
Solid sphere (about center) | \( \frac{2}{5}MR^2 \) |
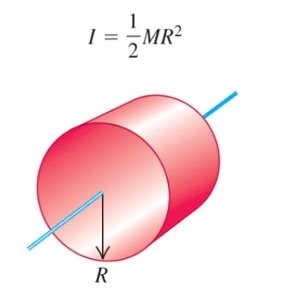
Solid cylinder (about axis) | \( \frac{1}{2}MR^2 \) |
Thin rod (center) | \( \frac{1}{12}ML^2 \) |
Thin rod (end) | \( \frac{1}{3}ML^2 \) |
Hollow cylinder | \( MR^2 \) |
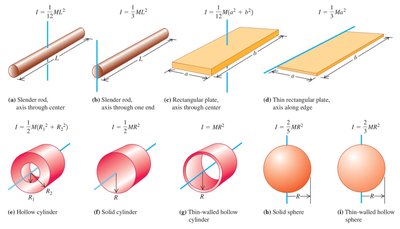
Example: If you form a sphere and a cylinder from the same mass and radius, the cylinder has a larger moment of inertia (\( \frac{1}{2}MR^2 > \frac{2}{5}MR^2 \)).
Summary Table: Linear vs. Rotational Motion
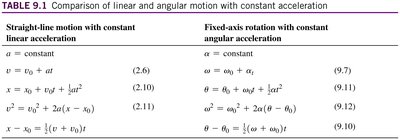
The following table summarizes the analogies between linear and rotational motion with constant acceleration:
Straight-line motion with constant linear acceleration | Fixed-axis rotation with constant angular acceleration |
|---|---|
\( a = \text{constant} \) | \( \alpha = \text{constant} \) |
\( v = v_0 + at \) | \( \omega = \omega_0 + \alpha t \) |
\( x = x_0 + v_0 t + \frac{1}{2} a t^2 \) | \( \theta = \theta_0 + \omega_0 t + \frac{1}{2} \alpha t^2 \) |
\( v^2 = v_0^2 + 2a(x - x_0) \) | \( \omega^2 = \omega_0^2 + 2\alpha(\theta - \theta_0) \) |
\( x - x_0 = \frac{1}{2}(v_0 + v)t \) | \( \theta - \theta_0 = \frac{1}{2}(\omega_0 + \omega)t \) |
Additional info: These notes expand on the provided slides by including definitions, formulas, and examples for each concept, ensuring a comprehensive and self-contained study guide for rotational motion in physics.
