 Back
BackRotational Motion: Concepts, Equations, and Applications
Study Guide - Smart Notes
 Tailored notes based on your materials, expanded with key definitions, examples, and context.
Tailored notes based on your materials, expanded with key definitions, examples, and context.
Rotational Motion
Introduction to Rotational Motion
Rotational motion describes the movement of objects around a fixed axis. This topic is fundamental in physics as it extends the concepts of linear motion to rotational analogs, introducing new quantities such as angular displacement, angular velocity, and angular acceleration.
Angular Position (\(\theta\)): The orientation of a line with another reference line, measured in radians (rad).
Angular Displacement (\(\Delta \theta\)): The change in angular position.
Angular Velocity (\(\omega\)): The rate of change of angular position, \(\omega = \frac{d\theta}{dt}\), unit: rad/s.
Angular Acceleration (\(\alpha\)): The rate of change of angular velocity, \(\alpha = \frac{d\omega}{dt}\), unit: rad/s2.
Relationship: 1 revolution = 360° = 2\(\pi\) rad.
Equations of Rotational Motion with Constant Angular Acceleration
These equations are analogous to those for linear motion, but with angular variables:
\(\omega = \omega_0 + \alpha t\)
\(\theta = \theta_0 + \omega_0 t + \frac{1}{2}\alpha t^2\)
\(\omega^2 = \omega_0^2 + 2\alpha (\theta - \theta_0)\)
\(\theta - \theta_0 = \frac{1}{2}(\omega_0 + \omega)t\)
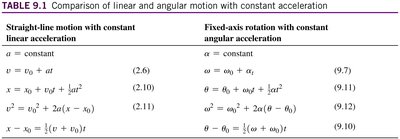
Table Purpose: The table compares equations for straight-line motion with constant linear acceleration and fixed-axis rotation with constant angular acceleration, highlighting the direct analogy between linear and angular variables.
Linear vs. Angular Quantities
Linear and angular quantities are related through the radius of rotation:
Linear Velocity (\(v\)): \(v = r\omega\)
Linear Acceleration (\(a\)): \(a = r\alpha\)
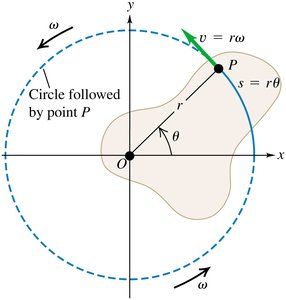
Example: A point on the rim of a rotating disk moves with a linear velocity proportional to its distance from the axis.
Moment of Inertia
Definition and Physical Meaning
The moment of inertia (\(I\)) quantifies how mass is distributed relative to an axis of rotation. It plays a role in rotational dynamics analogous to mass in linear dynamics.
For a point mass: \(I = mr^2\)
For continuous bodies: \(I = \int r^2 dm\)
Axis Dependence: The value of \(I\) depends on the chosen axis.
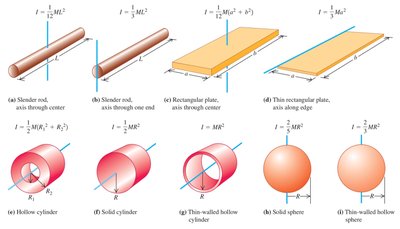
Table Purpose: The table summarizes moments of inertia for common shapes (rods, plates, cylinders, spheres) about specified axes.
Kinetic Energy of Rotation
The kinetic energy of a rotating rigid body is given by:
\(K = \frac{1}{2}I\omega^2\)
This formula is analogous to the translational kinetic energy \(K = \frac{1}{2}mv^2\).
Work-Energy Theorem for Rotation
Application Example: Winch Drum
Consider a light, flexible, nonstretching cable wrapped around a winch drum (solid cylinder, mass 50 kg, diameter 0.12 m). The cable is pulled with a constant force of 9.0 N for 2.0 m, unwinding without slipping. The goal is to find the final angular velocity (\(\omega\)) and the final speed (\(v\)) of the cable.
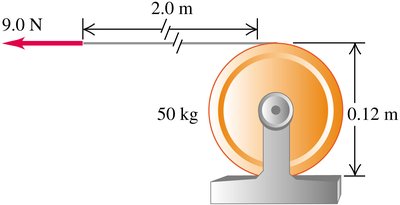
Work Done: \(W = F \cdot d\)
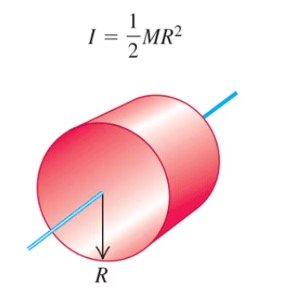
Rotational Kinetic Energy: \(K = \frac{1}{2}I\omega^2\)
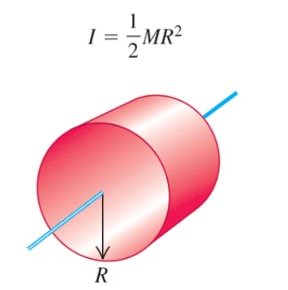
Moment of Inertia for Solid Cylinder: \(I = \frac{1}{2}MR^2\)
Solution Steps: Set the work done equal to the change in rotational kinetic energy to solve for \(\omega\).
Rotation About a Moving Axis
General Rigid-Body Motion
Rigid-body motion can be decomposed into translation of the center of mass and rotation about an axis through the center of mass. The total kinetic energy is the sum of translational and rotational parts:
\(K_{total} = \frac{1}{2}Mv_{CM}^2 + \frac{1}{2}I_{CM}\omega^2\)
This decomposition is essential for analyzing rolling and other complex motions.
Rolling Motion Without Slipping
Special Features and Kinematics
When an object rolls without slipping, the point of contact with the surface is momentarily at rest. The distance traveled in one revolution is equal to the circumference:
\(\Delta x = 2\pi R\)
\(v_{CM} = \omega R\)
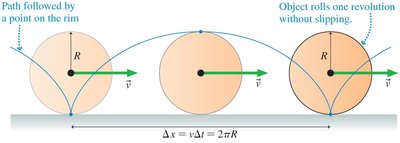
Example: For a wheel of radius \(R\) rolling one revolution, the center moves a distance \(2\pi R\).
Energy in Rolling Motion
The total kinetic energy of a rolling object is the sum of translational and rotational kinetic energies:
\(K_{total} = \frac{1}{2}Mv_{CM}^2 + \frac{1}{2}I_{CM}\omega^2\)
Exercise: Yo-Yo Dropping Down
A yo-yo (solid disk, radius \(R\), mass \(M\)) is released from rest and unwinds without slipping. To find the speed of the center of mass after dropping a distance \(h\), use energy conservation:
Potential energy lost = total kinetic energy gained
\(Mgh = \frac{1}{2}Mv_{CM}^2 + \frac{1}{2}I\omega^2\)
For a solid disk: \(I = \frac{1}{2}MR^2\), \(v_{CM} = \omega R\)
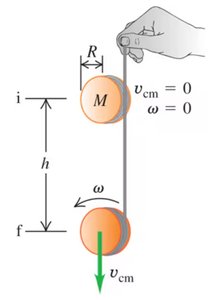
Solution: Substitute \(I\) and \(v_{CM} = \omega R\) to solve for \(v_{CM}\).
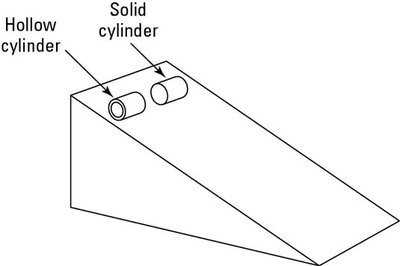
Rolling Objects on an Inclined Plane
Comparing Solid and Hollow Cylinders
When solid and hollow cylinders of equal mass and radius roll down an incline, the distribution of mass affects their acceleration and final speed. The moment of inertia for a solid cylinder is \(I = \frac{1}{2}MR^2\), and for a hollow cylinder \(I = MR^2\).
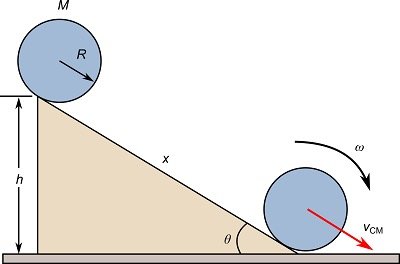
Key Point: The solid cylinder reaches the bottom first because it has a smaller moment of inertia, so more of its potential energy converts to translational kinetic energy.
General Case: Velocity at the Bottom
For any rolling object starting from rest at height \(h\):
\(Mgh = \frac{1}{2}Mv_{CM}^2 + \frac{1}{2}I_{CM}\omega^2\)
\(v_{CM} = \sqrt{\frac{2gh}{1 + \frac{I_{CM}}{MR^2}}}\)
Comparison: Objects with smaller \(I_{CM}\) (relative to \(MR^2\)) reach the bottom faster.
Summary Table: Moments of Inertia for Common Shapes
Object | Moment of Inertia (I) |
|---|---|
Solid cylinder | \(\frac{1}{2}MR^2\) |
Hollow cylinder | \(MR^2\) |
Solid sphere | \(\frac{2}{5}MR^2\) |
Thin-walled hollow sphere | \(\frac{2}{3}MR^2\) |
Slender rod (center) | \(\frac{1}{12}ML^2\) |
Slender rod (end) | \(\frac{1}{3}ML^2\) |
Application: Use these formulas to analyze rotational motion problems involving different shapes.
Additional info: The notes above expand on the provided slides and images, filling in standard academic context for rotational motion, energy, and rolling dynamics as covered in a typical college physics course.
