 Back
BackSpace, Time, and Frames of Reference in Classical Mechanics
Study Guide - Smart Notes
 Tailored notes based on your materials, expanded with key definitions, examples, and context.
Tailored notes based on your materials, expanded with key definitions, examples, and context.
Space and Time
Concept of Space
Space is a fundamental concept in physics, representing the three-dimensional framework within which all physical events and objects are located. In classical mechanics, space is considered real and possesses several important properties:
Infinitely large: Space extends without bound.
Three-dimensional: The position of any point is specified by three coordinates (x, y, z).
Continuous: There are no gaps or discrete jumps between points in space.
Homogeneous: All regions of space are identical; the laws of physics are the same everywhere.
Isotropic: The properties of space are the same in all directions.
Example: The location of a star in the night sky can be specified using three coordinates relative to an observer on Earth.
Concept of Time
Time is the continuous measure of the progression of events, used to order changes and describe the duration between occurrences. It is a one-dimensional quantity with the following properties:
Infinitely extended: Time has no beginning or end.
One-dimensional: Time progresses in a single direction from past to future.
Continuous: Time flows uniformly without interruption.
Homogeneous: Equal intervals of time are identical everywhere and for all observers.
Irreversible: Events occur in a definite order and cannot be reversed.
Example: The time interval between sunrise and sunset is measured in hours, minutes, and seconds.
Frames of Reference
Definition and Importance
A frame of reference is a coordinate system attached to a point or object relative to which measurements are made. All positions, motions, and events are specified relative to a chosen frame of reference. There is no absolute rest or motion; all are relative to the observer's frame.
Cartesian Coordinate System: Consists of an origin and three mutually perpendicular axes (x, y, z).
Position Specification: The coordinates of a point P(x, y, z) represent the sequence of displacements from the origin along the axes.
Example: The position of a ceiling fan in a room can be specified relative to a corner where two walls and the floor meet.
Relativity of Position and Motion
Relative Motion
The position and motion of objects are always specified relative to other objects. There is no absolute rest or motion; everything is in motion relative to something else. For example, a passenger in a moving train sees stationary objects outside as moving, while an observer on the platform sees the train as moving.
Key Point: Motion and rest are relative concepts, depending on the observer's frame of reference.
Coordinate Transformations
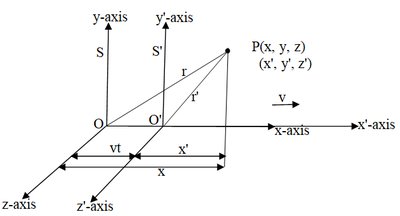
Galilean Transformation (Relative Translational Motion)
When two frames of reference move at constant velocity relative to each other, the coordinates of a point in space and time are related by the Galilean transformation:
This transformation applies to inertial frames moving with constant velocity relative to each other.
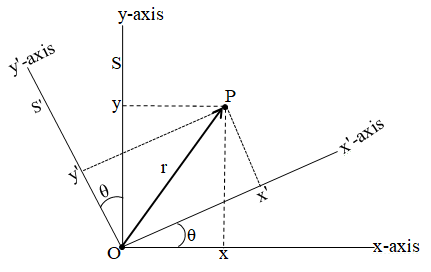
Rotational Transformation (Relative Rotational Motion)
When two frames share the same origin but their axes are rotated by an angle , the coordinates transform as:
This transformation is used to relate coordinates between frames rotated relative to each other.
Inertial and Non-Inertial Frames
Inertial Frames
An inertial frame of reference is one in which the laws of physics are invariant under coordinate transformations such as uniform translation or fixed rotation. Newton's laws hold in their original form in inertial frames. Any frame at rest or moving with constant velocity relative to another inertial frame is itself inertial.
Key Point: Experiments performed in inertial frames yield the same results regardless of the frame's uniform motion or orientation.
Non-Inertial Frames
A non-inertial frame of reference is accelerating or rotating with time relative to an inertial frame. In these frames, the laws of physics do not appear invariant unless additional, fictitious forces (pseudo forces) are introduced. Experiments in non-inertial frames may yield different results unless these forces are accounted for.
Key Point: The laws of classical mechanics are not invariant in non-inertial frames.
Elementary Coordinate Transformations: Example Table
The following table summarizes the main types of coordinate transformations discussed:
Transformation Type | Equation | Frame Condition |
|---|---|---|
Galilean (Translation) |
| Constant velocity, axes parallel |
Rotational |
| Axes rotated by angle |
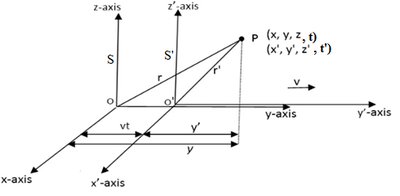
Spacetime Coordinates
Events in physics are specified by both spatial coordinates (x, y, z) and a temporal coordinate (t). The combination of these four coordinates forms the spacetime coordinate system, which is fundamental for describing motion and events in physics.
Summary
Space and time are fundamental concepts for describing motion and events.
Frames of reference are essential for specifying positions and motions; all motion is relative.
Coordinate transformations relate measurements between different frames.
Inertial frames preserve the form of physical laws; non-inertial frames require additional forces.
Spacetime coordinates provide a complete description of events in physics.
Additional info: The invariance of the length of the displacement vector under rotation is shown by the equation , demonstrating that the physical distance between points is unchanged by rotation of the coordinate axes.
