 Back
BackTorque and Moment of Inertia: Rotational Dynamics Study Notes
Study Guide - Smart Notes
 Tailored notes based on your materials, expanded with key definitions, examples, and context.
Tailored notes based on your materials, expanded with key definitions, examples, and context.
Torque and Rotational Equilibrium
Definition of Torque
Torque is a measure of the tendency of a force to rotate an object about an axis. It is a vector quantity, defined as the cross product of the position vector (r) and the force vector (F):
Formula:
Direction: Determined by the right-hand rule; positive if counterclockwise (ccw), negative if clockwise (cw).
Magnitude: Depends on the force, the distance from the axis of rotation, and the angle between r and F.
Example: Calculating torques for forces applied at different points and angles on a rod determines whether the rod will rotate and in which direction.

Conditions for Rotational Equilibrium
An object is in rotational equilibrium if the sum of all torques acting on it is zero:
Both the magnitude and direction of each torque must be considered.
Example: A rod with forces applied at various points can be analyzed for net torque to determine if it will rotate.

Applications of Torque: Human Body Examples
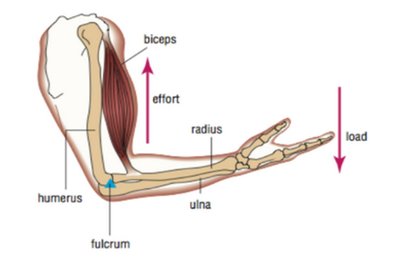
Biceps and Forearm as a Lever System
The human arm acts as a lever, with the biceps providing the effort force to hold or lift a load in the hand. The elbow acts as the fulcrum.
Effort (biceps force): Acts upward at a short distance from the fulcrum.
Load: Acts downward at a longer distance from the fulcrum.
Torque balance: for steady holding.
Example Calculation: Biceps Force
To find the force in the biceps when holding a weight, set the sum of torques about the elbow to zero and solve for the unknown force:
Include the weight of the forearm and the load.
Use the perpendicular distances from the fulcrum to each force.
Apply the torque formula for each force and solve for the biceps force.
Equation Example:
Result:
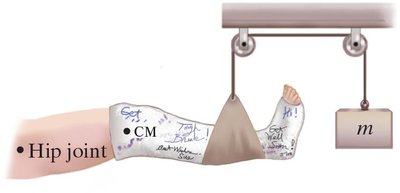
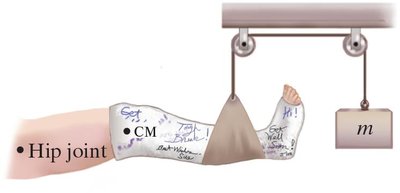
Suspending a Leg in a Cast
When a leg in a cast is suspended by a sling and a counterweight, the system is analyzed for rotational equilibrium about the hip joint.
Forces: Weight of the leg (center of gravity) and the tension from the sling (counterweight).
Distances: Measured from the hip joint to the center of gravity and to the sling attachment point.
Torque balance: to solve for the required mass m of the counterweight.
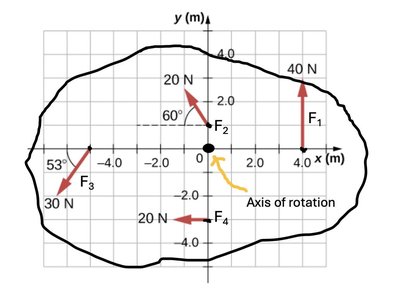
Practice Problem: Multiple Forces on a Rigid Body
Calculating Net Torque
When several forces act on a rigid body, the net torque about a chosen axis is the sum of the individual torques:
For each force, calculate using the perpendicular distance from the axis to the line of action of the force.
Assign positive or negative signs based on the direction (ccw or cw).
The net torque determines the direction of rotation.
Moment of Inertia
Definition and Physical Meaning
The moment of inertia (I) quantifies an object's resistance to changes in its rotational motion. It depends on both the mass of the object and how that mass is distributed relative to the axis of rotation.
Formula for a point mass:
For a system of particles:
For a continuous body:
Unit:
Moment of Inertia for Common Objects
The moment of inertia varies with the shape of the object and the axis about which it rotates. Some common formulas include:
Object and Axis | Picture | Moment of Inertia (I) |
|---|---|---|
Thin rod, about center | ||
Thin rod, about end | ||
Solid sphere, about diameter | ||
Cylinder or disk, about center | ||
Spherical shell, about diameter |
Additional info: Only the most relevant objects and axes are shown here. For a full table, refer to your textbook.
Calculating Moment of Inertia: Integration Approach
For extended bodies, the moment of inertia is calculated by integrating over the mass distribution:
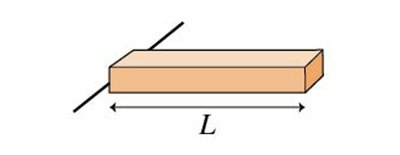
For a thin rod of length L and mass M about one end:
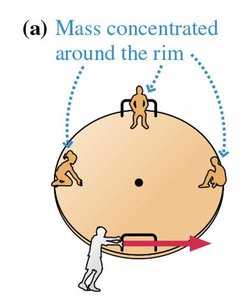
Dependence on Mass Distribution
The farther the mass is from the axis of rotation, the larger the moment of inertia. This is why a hoop (mass at the rim) is harder to spin than a disk (mass distributed closer to the center).

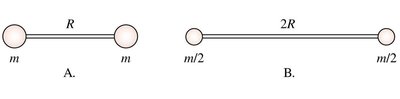
Comparing Moments of Inertia
Given two objects with the same mass but different mass distributions, the one with mass farther from the axis has a larger moment of inertia and is harder to rotate or stop.
Example: Two dumbbells, one with masses farther from the center, have different moments of inertia.
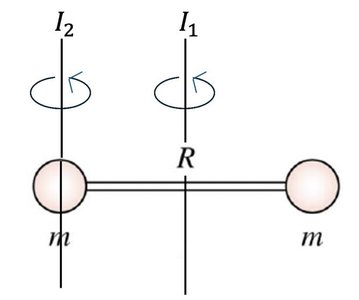
Practice Problem: Dumbbell-Shaped Object
For a dumbbell with two equal masses connected by a massless rod:
About the center:
About one end:
Conclusion:
Summary Table: Moments of Inertia for Common Shapes
Object and Axis | Picture | I |
|---|---|---|
Thin rod, about center | ||
Thin rod, about end | ||
Solid sphere, about diameter | ||
Cylinder or disk, about center | ||
Spherical shell, about diameter |
Key Takeaways
Torque causes rotational motion; its magnitude depends on force, distance, and angle.
Rotational equilibrium occurs when the sum of all torques is zero.
Moment of inertia measures resistance to rotational acceleration and depends on mass distribution.
Objects with mass farther from the axis are harder to rotate.
Use integration for complex shapes to find the moment of inertia.
