 Back
BackTranslational and Rotational Kinematics: Definitions, Key Terms, and Example Applications
Study Guide - Smart Notes
 Tailored notes based on your materials, expanded with key definitions, examples, and context.
Tailored notes based on your materials, expanded with key definitions, examples, and context.
Translational and Rotational Kinematics
Definitions
Translational and rotational kinematics are two fundamental branches of mechanics that describe the motion of objects. Translational kinematics focuses on the linear motion of objects, while rotational kinematics deals with the motion of objects rotating about an axis.
Translational motion: All parts of the object move the same distance in the same direction over time.
Rotational motion: The object spins around a fixed axis, with different points moving in circular paths at varying speeds depending on their distance from the axis.
Key Terms
Understanding the following terms is essential for mastering translational and rotational kinematics:
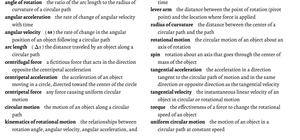
Angular displacement (θ): The angle of arc length as it relates to the radius of a circular path.
Angular velocity (ω): The rate of change in the angular position of an object following a circular path.
Angular acceleration (α): The rate of change of angular velocity.
Arc length (s): The distance traveled by an object along a circular path.
Centripetal force: The force that acts in the direction of the center of rotation, needed for uniform circular motion.
Moment of inertia (I): The rotational equivalent of mass; a measure of an object's resistance to changes in rotational motion.
Torque (τ): The effectiveness of a force to change the rotational motion of an object.
Rotational equilibrium: The state of an object when the sum of all torques acting on it is zero.
Translational Kinematics
Translational kinematics studies the motion of an object in which all parts move the same distance in the same direction over time. This motion can be linear (straight line) or curvilinear (curved path).
Key features: Every point on the object has the same velocity and acceleration.
Equations of motion: Used to describe displacement, velocity, and acceleration as functions of time.
Rotational Kinematics
Rotational kinematics studies the motion of an object that rotates about a fixed axis. Different points on the object move in circular paths, and points farther from the axis move faster (greater linear speed).
Key features: The object spins around a fixed axis; angular displacement, velocity, and acceleration describe its motion.
Relationship to linear motion: Many equations have direct analogs in translational kinematics.
Comparison of Translational and Rotational Quantities
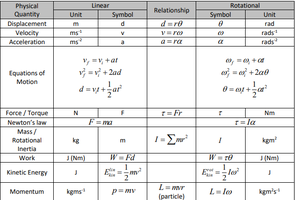
The following table summarizes the main physical quantities, their units, symbols, and relationships for both linear and rotational motion:
Physical Quantity | Linear Unit | Linear Symbol | Linear Relationship | Rotational Symbol | Rotational Unit |
|---|---|---|---|---|---|
Displacement | m | d | $d = r \theta$ | \theta | rad |
Velocity | m/s | v | $v = r \omega$ | \omega | rad/s |
Acceleration | m/s^2 | a | $a = r \alpha$ | \alpha | rad/s^2 |
Equations of Motion | $v_f = v_i + at$ $v_f^2 = v_i^2 + 2ad$ $d = v_i t + \frac{1}{2} a t^2$ $\omega_f = \omega_i + \alpha t$ $\omega_f^2 = \omega_i^2 + 2 \alpha \theta$ $\theta = \omega_i t + \frac{1}{2} \alpha t^2$ | ||||
Force / Torque | N | F | $F = ma$ | \tau | N·m |
Newton's Law | $F = ma$ | $\tau = I \alpha$ | |||
Mass / Rotational Inertia | kg | m | I | kg·m^2 | |
Work | J (Nm) | W | $W = Fd$ | $W = \tau \theta$ | J |
Kinetic Energy | J | $KE = \frac{1}{2}mv^2$ | $KE_{rot} = \frac{1}{2}I\omega^2$ | J | |
Momentum | kg·m/s | $p = mv$ | $L = I\omega$ | kg·m^2/s | |
Example: Calculating the Acceleration of a Fishing Reel
This example demonstrates the application of rotational kinematics to a real-world scenario involving a fishing reel:
Given: The fishing line unwinds from a reel at a radius of 4.50 cm. The reel is given an angular acceleration of 110 rad/s2 and starts from rest.
(a) Final angular velocity after 2.00 s: $\omega = \omega_0 + \alpha t$ $\omega = 0 + (110\ \mathrm{rad/s^2})(2.00\ \mathrm{s}) = 220\ \mathrm{rad/s}$
(b) Speed of fishing line leaving the reel: $v = r\omega$ $v = (0.0450\ \mathrm{m})(220\ \mathrm{rad/s}) = 9.90\ \mathrm{m/s}$
(c) Number of revolutions made by the reel: $\theta = \omega_0 t + \frac{1}{2} \alpha t^2$ $\theta = 0 + 0.5 \times 110\ \mathrm{rad/s^2} \times (2.00\ \mathrm{s})^2 = 220\ \mathrm{rad}$ To convert to revolutions: $\theta = (220\ \mathrm{rad}) \times \frac{1\ \mathrm{rev}}{2\pi\ \mathrm{rad}} = 35.0\ \mathrm{rev}$
(d) Meters of fishing line unwound: $x = r\theta = (0.0450\ \mathrm{m})(220\ \mathrm{rad}) = 9.90\ \mathrm{m}$
Additional info: The above example illustrates the direct application of rotational kinematics equations and their relationship to linear quantities, reinforcing the importance of understanding both translational and rotational motion in physics.
