 Back
BackVectors and Forces: Foundations of Physics
Study Guide - Smart Notes
 Tailored notes based on your materials, expanded with key definitions, examples, and context.
Tailored notes based on your materials, expanded with key definitions, examples, and context.
Vectors and Scalars
Definitions and Notation
In physics, quantities are classified as either scalars or vectors. Scalars have only magnitude (size), while vectors have both magnitude and direction. Understanding the distinction is essential for analyzing physical phenomena.
Scalar Quantity: Has magnitude, algebraic sign, and units, but no direction (e.g., mass, temperature).
Vector Quantity: Has both magnitude and direction (e.g., force, velocity).
Notation: Vectors are denoted by boldface symbols with arrows (e.g., \( \vec{F} \)), while their magnitudes are written in italics without arrows (e.g., F).
Magnitude: The magnitude of a vector is always non-negative and is denoted by absolute value bars: \( F = |\vec{F}| \).
Graphical Representation and Addition of Vectors
Vector Representation
Vectors are represented graphically by arrows. The direction of the arrow indicates the direction of the vector, and the length (when drawn to scale) is proportional to its magnitude. The negative of a vector points in the opposite direction.
Graphical Vector Addition
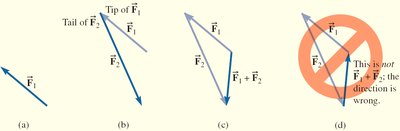
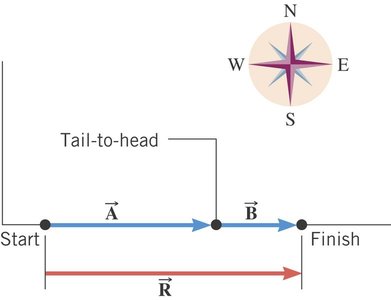
Vectors are added using the tip-to-tail method. The resultant vector is drawn from the tail of the first vector to the tip of the last vector.
When vectors are along the same straight line, their magnitudes are added algebraically, considering direction.

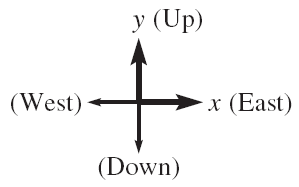
Vector Components and Resolution
Resolving Vectors into Components
Any vector in a plane can be expressed as the sum of its components along the x- and y-axes. This process is called resolving a vector.
The x-component is parallel to the x-axis; the y-component is parallel to the y-axis.
The sign of each component indicates its direction along the respective axis.
Trigonometric Relationships and the Pythagorean Theorem
Trigonometric functions relate the sides of a right triangle to its angles, which is essential for finding vector components.
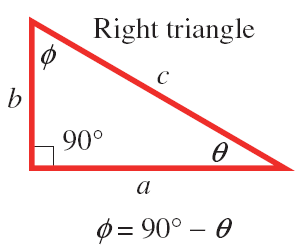
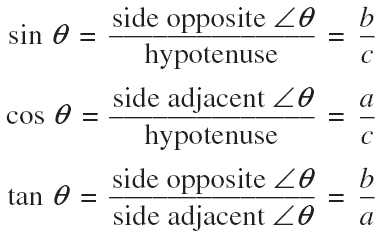
\( \sin \theta = \frac{\text{opposite}}{\text{hypotenuse}} \)
\( \cos \theta = \frac{\text{adjacent}}{\text{hypotenuse}} \)
\( \tan \theta = \frac{\text{opposite}}{\text{adjacent}} \)
Pythagorean theorem: $c^2 = a^2 + b^2$
Finding Components from Magnitude and Direction
Given a vector's magnitude and direction, its components can be found using trigonometry:
\( F_x = F \cos \theta \)
\( F_y = F \sin \theta \)
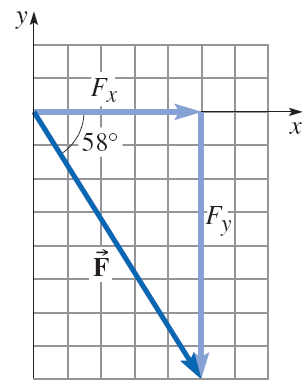
Example: Force Vector Components
Suppose a force of 9.4 N acts at 58° below the +x-axis. The x- and y-components are found as follows:
\( F_x = 9.4 \cos 58^\circ \)
\( F_y = 9.4 \sin (-58^\circ) \)
Quadrant Signs for Components
The sign of each component depends on the vector's direction relative to the axes.
Adding Vectors Using Components
Procedure
To add vectors using components:
Resolve each vector into x- and y-components.
Add all x-components to get the resultant x-component.
Add all y-components to get the resultant y-component.
Find the magnitude and direction of the resultant vector:
Magnitude: $C = \sqrt{C_x^2 + C_y^2}$
Direction: $\theta = \tan^{-1}\left(\frac{C_y}{C_x}\right)$
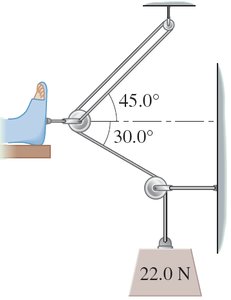
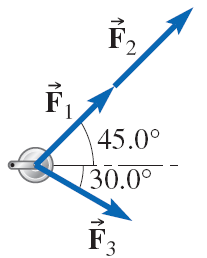
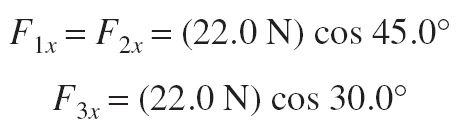
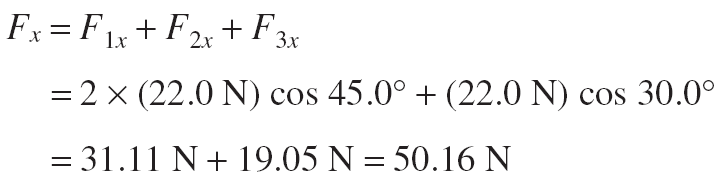
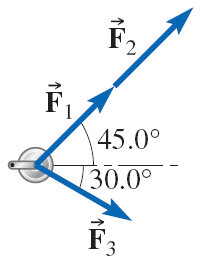
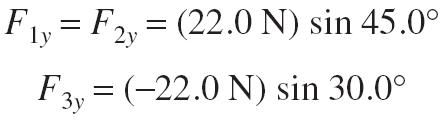
Example: Forces in a Traction Apparatus
Three cords pull on a central pulley, each with a force of 22.0 N at different angles. The resultant force is found by resolving each force into components and summing them.
Types of Forces in Physics
Fundamental and Contact Forces
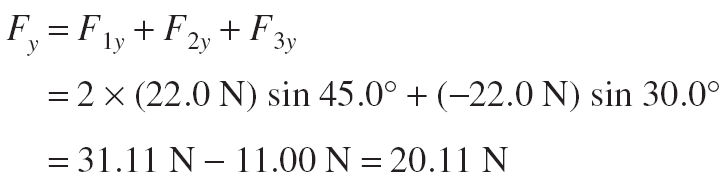
Forces are classified as either fundamental (long-range) or contact forces:
Fundamental Forces: Gravitational, electromagnetic, strong nuclear, and weak nuclear forces.
Contact Forces: Normal force, friction (static and kinetic), tension.
All forces are vectors and measured in newtons (N).
Net Force and Equilibrium
Net Force
The net force on an object is the vector sum of all forces acting on it. The net force determines the object's acceleration according to Newton's laws.
If the net force is zero, the object is in equilibrium (no acceleration).
Newton's First Law (Law of Inertia)
An object's velocity remains constant if and only if the net force acting on it is zero. This property is called inertia.
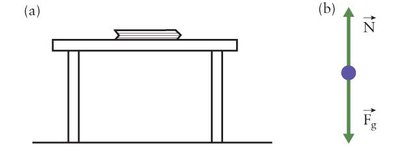
Free-Body Diagrams (FBDs)
Drawing Free-Body Diagrams
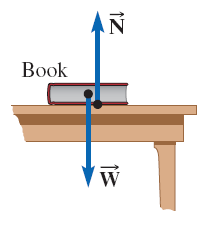
A free-body diagram is a simplified sketch showing all forces acting on a single object. It is a crucial tool for analyzing forces and solving equilibrium problems.
Draw the object as a simple shape.
Represent each force as an arrow pointing in the correct direction.
Label all forces and indicate their directions.
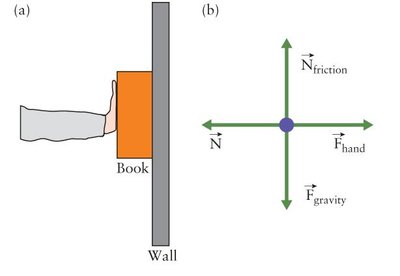
Frictional Forces
Normal Force
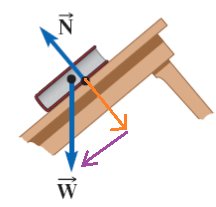
The normal force is the perpendicular contact force exerted by a surface on an object. It balances the component of weight perpendicular to the surface.
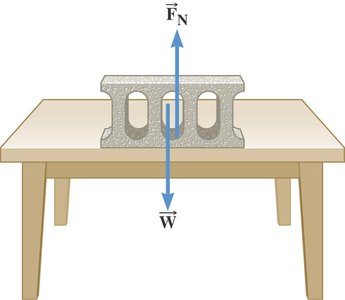
On a horizontal surface: $N = W$
On an inclined plane: $N = W \cos \theta$
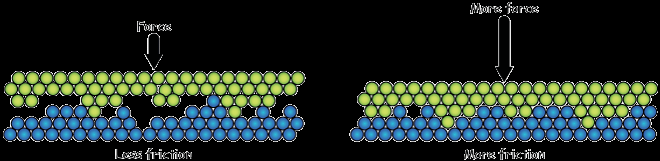
Friction
Friction is the force that opposes the relative motion of two surfaces in contact. It is caused by microscopic irregularities between surfaces.
Static friction prevents motion up to a maximum value: $f_s \leq \mu_s N$
Kinetic friction opposes motion once sliding begins: $f_k = \mu_k N$
Typically, $\mu_s > \mu_k$
Tension and Pulleys
Tension Force
Tension is the pulling force transmitted by a string, rope, or cable. In an ideal cord (massless and inextensible), the tension is the same throughout.
An ideal pulley changes the direction of the tension force but not its magnitude.
Summary Table: Types of Forces
Type of Force | Nature | Example |
|---|---|---|
Gravitational | Long-range | Earth's gravity on objects |
Electromagnetic | Long-range | Magnetism, electric forces |
Strong Nuclear | Long-range (subatomic) | Binding protons/neutrons |
Weak Nuclear | Long-range (subatomic) | Radioactive decay |
Normal | Contact | Table supports a book |
Friction | Contact | Sliding box on floor |
Tension | Contact | Rope pulling a block |
Key Equations
Magnitude of a vector: $|\vec{A}| = \sqrt{A_x^2 + A_y^2}$
Components: $A_x = A \cos \theta$, $A_y = A \sin \theta$
Static friction: $f_s \leq \mu_s N$
Kinetic friction: $f_k = \mu_k N$
Newton's Law of Universal Gravitation: $F = G \frac{m_1 m_2}{r^2}$
