Skip to main content
Trigonometry
My Course
Learn
Exam Prep
AI Tutor
Study Guides
Textbook Solutions
Flashcards
Explore
Try the app
My Course
Learn
Exam Prep
AI Tutor
Study Guides
Textbook Solutions
Flashcards
Explore
Try the app
Back
Convert Points Between Polar and Rectangular Coordinates definitions
You can tap to flip the card.
Polar Coordinates
You can tap to flip the card.
👆
Polar Coordinates
A system representing points by distance from the origin and angle from the positive x-axis, useful for circular and rotational contexts.
Track progress
Control buttons has been changed to "navigation" mode.
1/15
Related flashcards
Related practice
Recommended videos
Convert Points Between Polar and Rectangular Coordinates quiz #1
Convert Points Between Polar and Rectangular Coordinates
10 Terms
Convert Equations Between Polar and Rectangular Forms
9. Polar Equations
3 problems
Topic
ErnestBlazevic
9. Polar Equations
3 topics
7 problems
Chapter
Patrick
2:21
Convert Points from Rectangular to Polar Example 1
423
views
2
rank
6:58
Convert Points from Rectangular to Polar
422
views
2
rank
06:17
Convert Points from Polar to Rectangular
556
views
2
rank
Terms in this set (15)
Hide definitions
Polar Coordinates
A system representing points by distance from the origin and angle from the positive x-axis, useful for circular and rotational contexts.
Rectangular Coordinates
A system representing points by horizontal and vertical distances from the origin, commonly used in Cartesian graphs.
Hypotenuse
The longest side of a right triangle, connecting the origin to a point in polar coordinates and used to calculate r.
Unit Circle
A circle with radius 1 centered at the origin, foundational for understanding trigonometric relationships in coordinate conversions.
Cosine
A trigonometric function relating the adjacent side to the hypotenuse, used to find the x-component in conversions.
Sine
A trigonometric function relating the opposite side to the hypotenuse, used to find the y-component in conversions.
Inverse Tangent
A function used to determine the angle from the ratio of y to x, essential for finding θ in polar coordinates.
Quadrant
One of four regions in the coordinate plane, important for adjusting angles during conversions between systems.
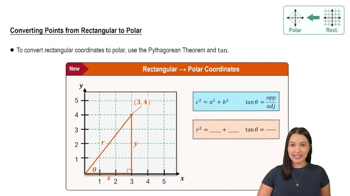
Pythagorean Theorem
A formula relating the sides of a right triangle, used to calculate the distance r from x and y values.
Quadrantal Angle
An angle located on the axes, such as 0, π/2, π, or 3π/2, relevant when points lie directly on x or y axes.
Origin
The central point (0,0) in both coordinate systems, corresponding to r = 0 in polar coordinates.
Angle θ
The measure from the positive x-axis to the line connecting the origin to the point, crucial for polar representation.
Radius r
The distance from the origin to a point, forming the hypotenuse in the triangle used for conversions.
Decimal Form
A numerical representation used for easier plotting and visualization of coordinates on graphs.
Coordinate System
A framework for locating points, either by (x, y) or (r, θ), enabling conversion and comparison between representations.
 BackBack
BackBack


 2:21
2:21