In solving problems involving connected systems of objects, inclined planes, and friction, it is essential to integrate these concepts effectively. When approaching such problems, the type of friction—static or kinetic—will typically be specified in the problem statement. This clarity allows for a more straightforward application of the problem-solving steps previously learned.
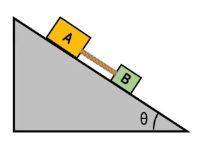
Consider a scenario with two blocks on a 30-degree inclined plane, where one block (Block A) is on the incline and the other (Block B) is hanging. The known parameters include the weights and masses of both blocks, as well as the coefficient of kinetic friction. Since Block B is moving up the incline, we can conclude that kinetic friction is acting on Block A, opposing its motion.
To analyze the forces acting on each block, we begin by drawing free body diagrams. For Block A, the forces include its weight (\(m_A g\)), the normal force perpendicular to the surface, tension from the cable, and kinetic friction. The weight can be resolved into components along the incline, with \(m_A g \sin(\theta)\) acting down the incline and \(m_A g \cos(\theta)\) acting perpendicular to it. For Block B, the forces consist of its weight (\(m_B g\)) acting downward and the tension in the cable acting upward.
Next, we apply Newton's second law, \(F = ma\), to each block. For Block B, the equation can be expressed as:
\[\sum F_y = m_B g - T = m_B a\]
For Block A, the forces along the incline yield:
\[\sum F_x = T - m_A g \sin(\theta) - f_k = m_A a\]
Here, \(f_k\) represents the kinetic friction, calculated as \(f_k = \mu_k N\), where \(N\) is the normal force. On an incline, the normal force is given by \(N = m_A g \cos(\theta)\). Thus, the kinetic friction can be expressed as:
\[f_k = \mu_k m_A g \cos(\theta)\]
By substituting known values into these equations, we can solve for the unknowns, which include the tension and the acceleration of the system. After setting up the equations and eliminating the tension, we can find the acceleration by combining the equations appropriately. The final result for the acceleration of the system can be calculated, yielding a value of \(5.2 \, \text{m/s}^2\).
This process illustrates the importance of systematically applying the principles of mechanics to solve complex problems involving multiple forces and motion on inclined planes. Understanding the interactions between these forces is crucial for accurately determining the behavior of the system.