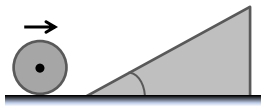
In the study of rotational dynamics, particularly in rolling motion, we explore how objects rotate around an axis while also translating. This concept can be visualized with a rolling object, such as a toilet paper roll, which moves sideways while rotating. When analyzing such motion, it is essential to recognize that the object experiences both linear and angular acceleration.
For a rolling object, the relationship between linear velocity at the center of mass (\(v_{cm}\)) and angular velocity (\(\omega\)) is given by the equation:
\(v_{cm} = R \omega\)
where \(R\) is the radius of the object. Similarly, the linear acceleration (\(a\)) is related to angular acceleration (\(\alpha\)) by:
\(a = R \alpha\)
In rolling motion, static friction plays a crucial role. It is the force that provides the necessary torque to cause angular acceleration. The torque (\(\tau\)) can be expressed as:
\(\tau = F_{friction} \cdot R\)
where \(F_{friction}\) is the static friction force acting at the radius \(R\). This torque leads to angular acceleration, and it is important to note that if there is no static friction, there can be no angular acceleration. This principle is often summarized with the phrase, "You need static friction to have angular acceleration."
When analyzing a solid cylinder rolling down an inclined plane without slipping, we can derive the angular acceleration (\(\alpha\)). The forces acting on the cylinder include gravitational force (\(mg\)), which can be decomposed into components parallel and perpendicular to the incline. The net force acting down the incline is given by:
\(F_{net} = mg \sin(\theta) - F_{friction}\
where \(\theta\) is the angle of the incline. The torque due to static friction is the only torque acting on the cylinder, leading to the equation:
\(\tau = I \alpha\
where \(I\) is the moment of inertia of the cylinder, given by:
\(I = \frac{1}{2} m R^2\
By substituting the expressions for torque and angular acceleration, we can relate linear and angular quantities. The final expression for the linear acceleration (\(a\)) of the cylinder down the incline is:
\(a = \frac{2}{3} g \sin(\theta)\
From this, we can find the angular acceleration (\(\alpha\)) using the relationship between linear and angular acceleration:
\(\(\alpha\) = \(\frac{a}{R}\) = \(\frac{2g \sin(\theta)}{3R}\)\
This analysis highlights the interconnectedness of linear and rotational motion, emphasizing the importance of static friction in rolling dynamics. Understanding these principles is crucial for solving problems related to rolling objects in physics.