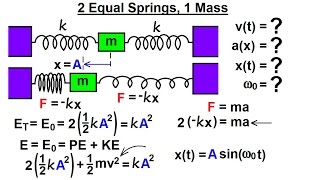
06:45Physics - Mechanics: Ch 16.5 Simple Harmonic Motion-2 Springs (1 of 5) 2 Equal Springs, 1 MassMichel van Biezen224views
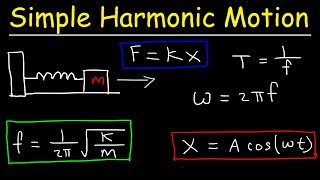
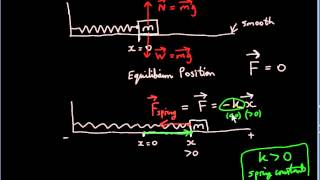
04:00Simple Harmonic Motion Introduction(SHM) via a Horizontal Mass-Spring SystemFlipping Physics378views

 03:52
03:52